

Radio frequency identification target positioning method based on unmanned aerial vehicle
A target positioning and radio frequency identification technology, applied in the field of target positioning based on drones, can solve problems such as inability to carry antenna arrays, low RFID radio frequency scanning efficiency, lack of accuracy in drones, etc., to reduce workload and reduce errors. quantity, and ensure the effect of high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings.
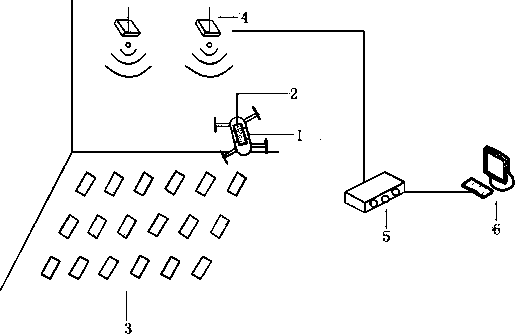
[0024] The present invention proposes a target positioning method combining unmanned aerial vehicles and radio frequency identification, and proposes to host a relay module on the unmanned aerial vehicle fuselage to form an automatic RFID reader as a mobile scanner to perform secondary forwarding of the reader's radio frequency signal. After completing the collection of tag information and the location of target tags in high-altitude, high-temperature and other hazardous environment areas, the specific operation steps of the present invention will be further described in detail in conjunction with the accompanying drawings.
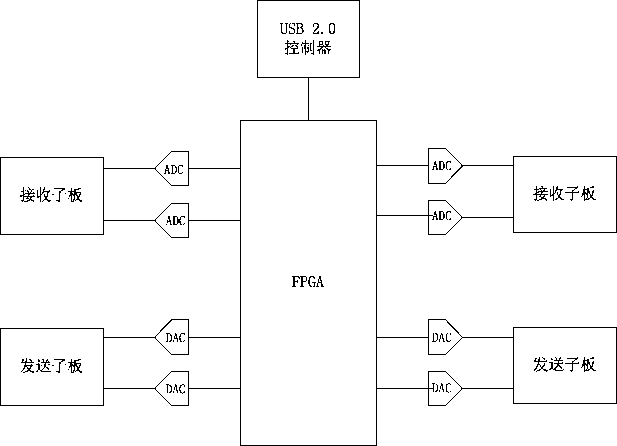
[0025] Such as figure 1 As shown, the relay module USRP carried is mainly composed of a USRP motherboard and various types of daughter boards. It mainly includes two parts: an FPGA motherboard with high-speed si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More