Four-foot bionic robot with flexible spine
A bionic robot and robot technology, applied in the field of robotics, can solve the problems of limited moving speed, complex coordination control, and small carrying capacity of robots, and achieve the effects of optimizing the trajectory, increasing the adjustable range, and strong carrying capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
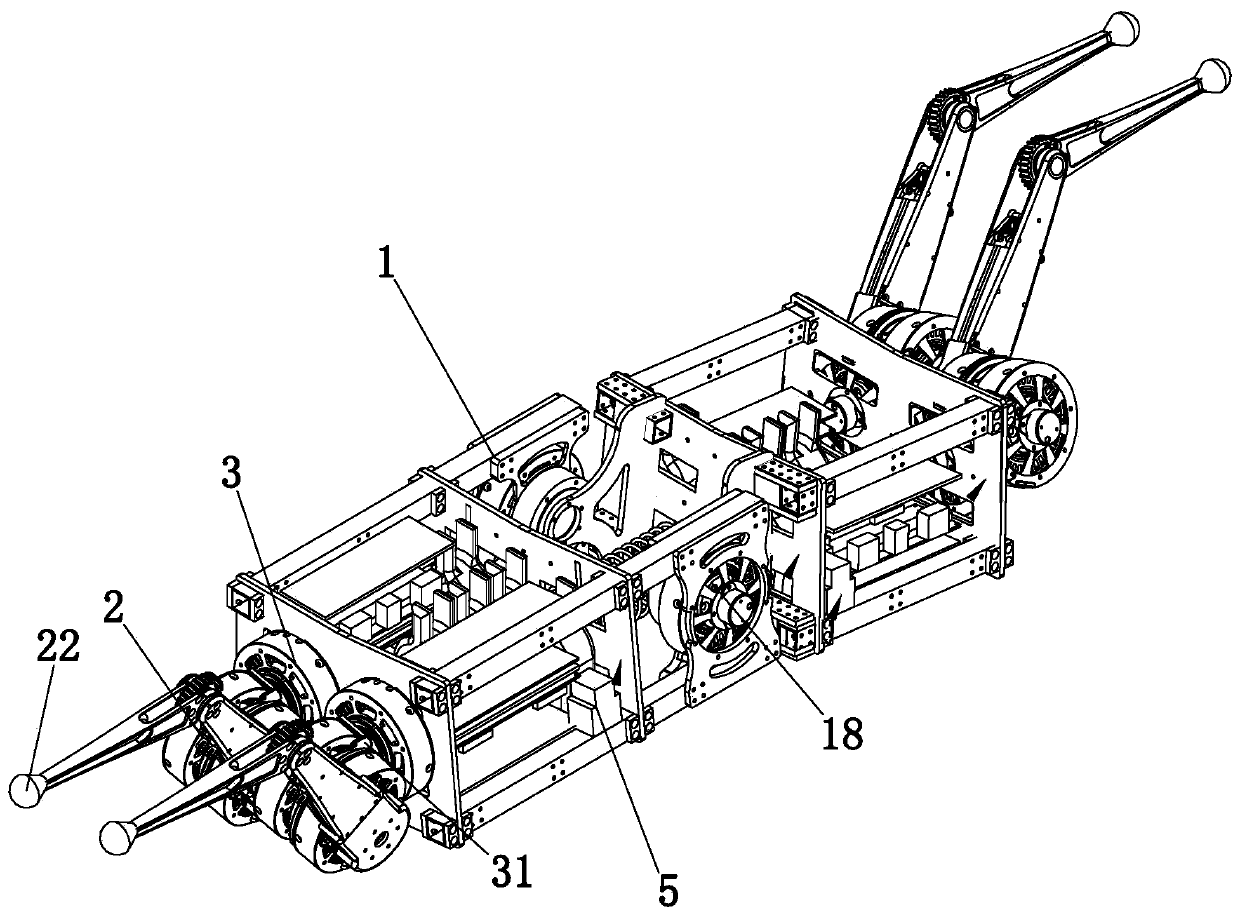
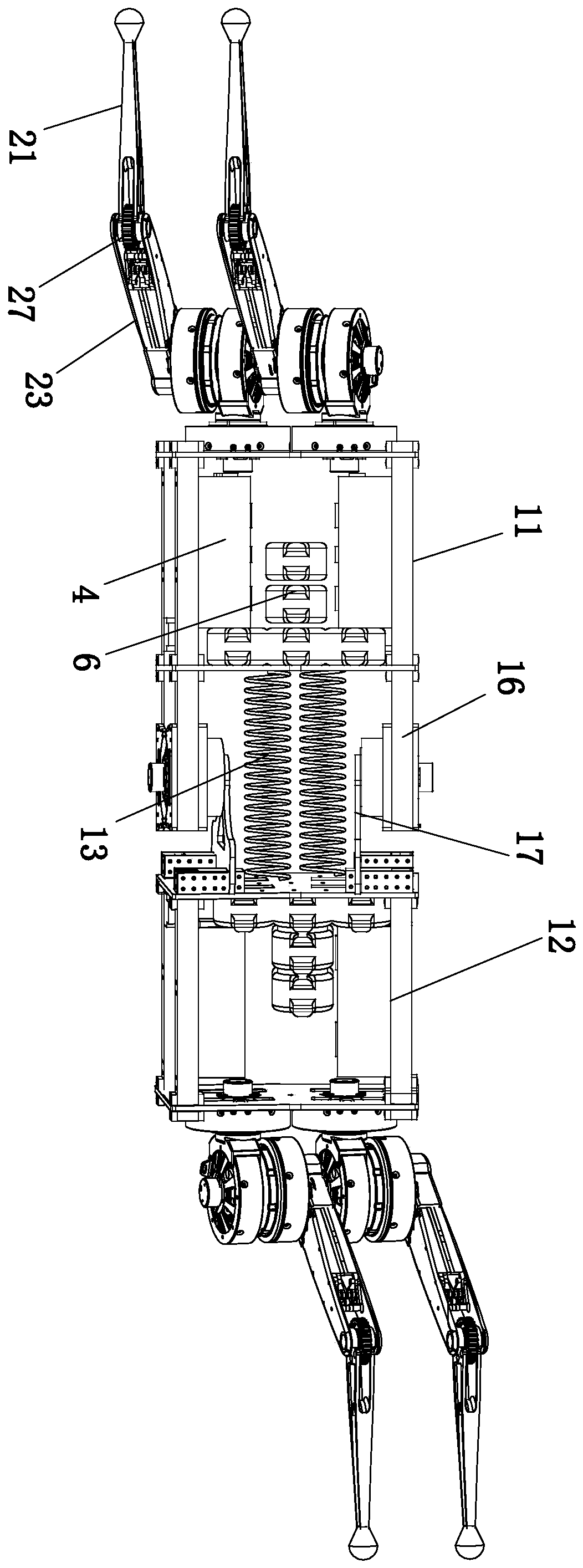
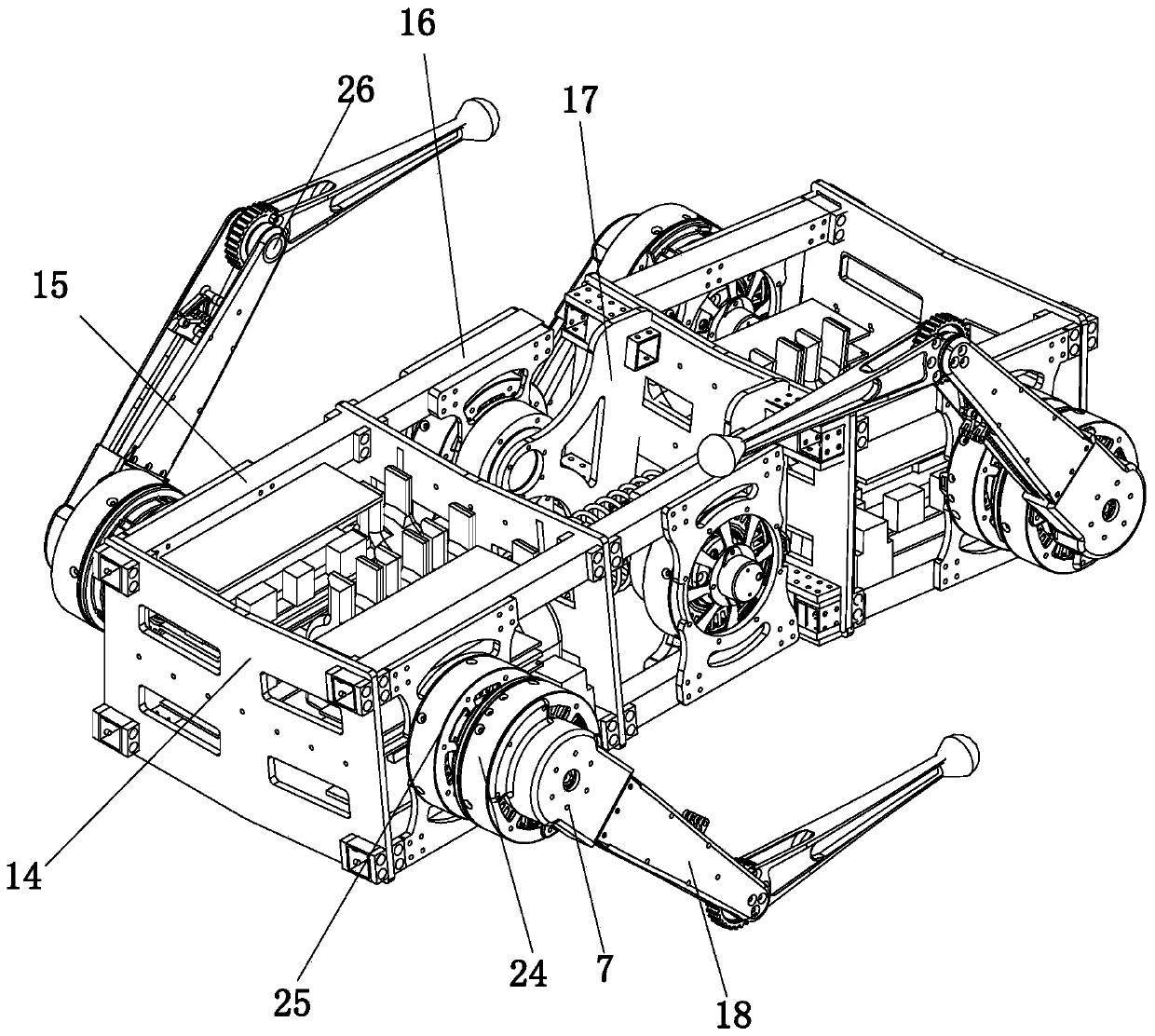
[0032] Such as Figure 1-Figure 5 As shown, a quadruped bionic robot with a flexible spine, the robot includes a flexible spine 1 and several multi-degree-of-freedom robot legs 2 fixed on the flexible spine 1, and the flexible spine 1 includes a rectangular structure The main skeleton 11, the sub-skeleton 12 and the buffer spring 13, the end of the main skeleton 11 is equipped with a supporting part 16, and several rotating motors 18 are installed on the connecting part, and the output shafts of all the rotating motors 18 The axes are collinear, and the end of the sub-skeleton 12 is equipped with a connecting frame 17, and the connecting frame 17 is fixedly connected with the output shafts of all rotating electrical machines 18, and the two ends of all the buffer springs 13 are connected with the main frame 11 respectively. The end face where the supporting part 16 is located and the end face where the sub-frame 12 is located at the connecting frame 17 are fixedly connected, a...
Embodiment 2
[0045] Such as Figure 1-Figure 5 As shown, a quadruped bionic robot with a flexible spine, the robot includes a flexible spine 1 and several multi-degree-of-freedom robot legs 2 fixed on the flexible spine 1, and the flexible spine 1 includes a rectangular structure The main skeleton 11, the sub-skeleton 12 and the buffer spring 13, the end of the main skeleton 11 is equipped with a supporting part 16, and several rotating motors 18 are installed on the connecting part, and the output shafts of all the rotating motors 18 The axes are collinear, and the end of the sub-skeleton 12 is equipped with a connecting frame 17, and the connecting frame 17 is fixedly connected with the output shafts of all rotating electrical machines 18, and the two ends of all the buffer springs 13 are connected with the main frame 11 respectively. The end face where the supporting part 16 is located and the end face where the sub-frame 12 is located at the connecting frame 17 are fixedly connected, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More