

Track generation method of mobile operation robot based on second-order cone programming
A second-order cone planning and mobile operation technology, applied in the field of robotics, can solve the problems of no application of mobile operation robots, long time consumption, complex dynamic equations, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0205] This embodiment discloses a method for generating a trajectory of a mobile robot based on second-order cone planning. The specific implementation steps are as follows:
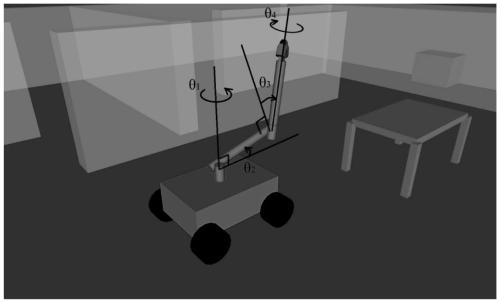
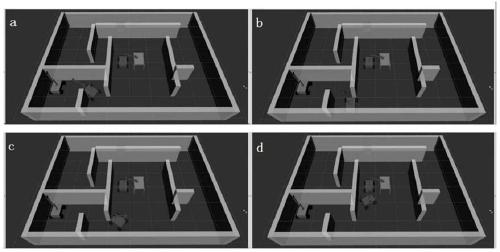
[0206] Step 1: the robot involved in the embodiment of the present invention such as figure 1 As shown, the path planned by the RRT-Connect algorithm is as follows figure 2 As shown, its chassis is a cuboid with a length of 60cm, a width of 40cm, and a height of 20cm. 2 . There are four omnidirectional mecanum wheels on the chassis. The mechanical arm loaded on the chassis has four cylindrical connecting rods, the first connecting rod is 0.1m long and the radius is 0.03m; the second connecting rod is 0.5m long and the radius is 0.03m; the third connecting rod The length is 0.1m and the radius is 0.03m; the fourth connecting rod is 0.4m long and the radius is 0.03m. Then the end of the fourth connecting rod is connected with a mechanical gripper, for the convenience of calculation, its mass and ine...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More