

Data fusion method based on multiple laser radars
A radar data and multi-laser technology, applied in radio wave measurement systems, instruments, etc., can solve the problem that the accuracy of the effect is not as good as the original data fusion, and achieve the effect of ensuring effective use, ensuring data, and accurate identification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with the accompanying drawings.
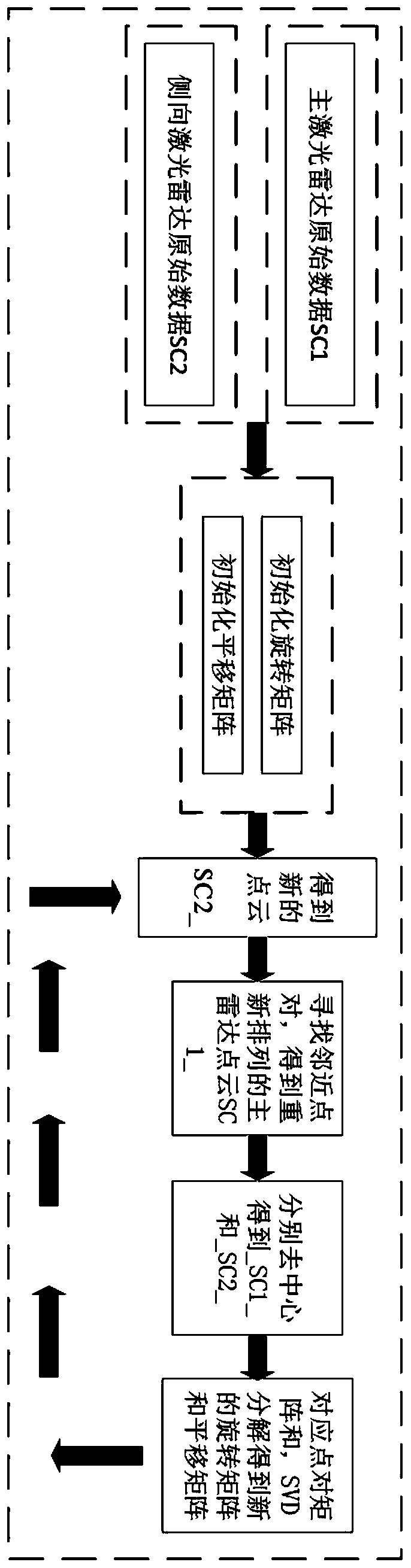
[0019] The present invention is based on the method for multi-laser radar data fusion, comprises the following steps:
[0020] Step 1: read the original data SC1 of the main laser radar and the original data SC2 of the side laser radar;
[0021] Step 2: Initialize the rotation matrix and translation matrix;
[0022] Step 3: According to the rotation matrix and translation matrix in step 2, transform the point cloud to obtain a new point cloud SC2_;
[0023] Step 4: Find adjacent point pairs to obtain the rearranged main radar point cloud SC1_;
[0024] Step 5: Go to the center to get _SC1_ and _SC2_ respectively;
[0025] Step 6: Decompose the corresponding point pair matrix and SVD to obtain a new rotation matrix and translation matrix;
[0026] Step 7: Repeat steps 3 to 6 until the position difference of the corresponding point pair is less than the set threshold...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More