

Environment sensing method of unmanned vehicle and control terminal
An unmanned vehicle, environment perception technology, applied in the environment perception method and control terminal field of unmanned vehicles, can solve major safety accidents, restrict the development of unmanned driving and other problems, achieve high resolution and good all-weather performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0069] Please refer to figure 1 , Embodiment 1 of the present invention is:
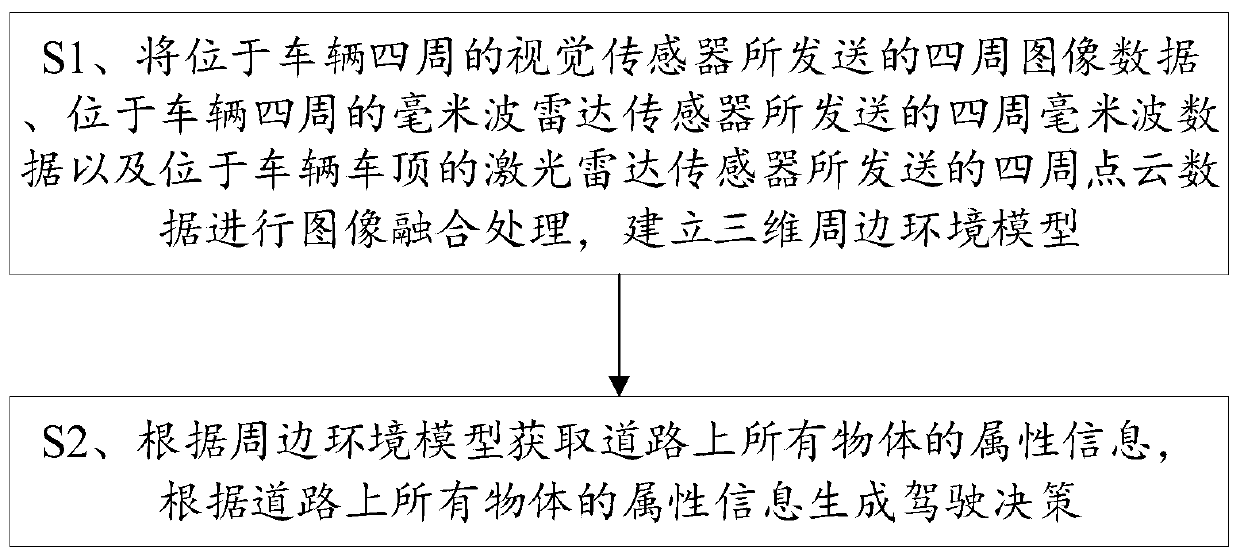
[0070] A method for environment perception of an unmanned vehicle, comprising the steps of:
[0071] S1. Perform image fusion on the surrounding image data sent by the visual sensors located around the vehicle, the surrounding millimeter wave data sent by the millimeter wave radar sensor located around the vehicle, and the surrounding point cloud data sent by the lidar sensor located on the vehicle roof. processing and establishing a three-dimensional surrounding environment model;
[0072] In this embodiment, step S1 specifically includes the following steps:
[0073] S11. Receive the front binocular image data sent by the binocular camera located in front of the vehicle, the monocular image data on both sides sent by the monocular camera located on both sides of the vehicle, and the rear monocular image data sent by the monocular camera located at the rear of the vehicle Image data to obtain sur...
Embodiment 2
[0091] Please refer to figure 2 , the second embodiment of the present invention is:
[0092] An environment perception control terminal 1 of an unmanned vehicle, including a memory 3, a processor 2, and a computer program stored in the memory 3 and operable on the processor 2, and the processor 2 implements the first embodiment above when executing the computer program in the steps.
[0093] An environment perception control terminal 1 of an unmanned vehicle forms an environment perception system with binocular cameras, multiple monocular cameras, millimeter-wave radar sensors and lidar sensors on the unmanned vehicle, wherein the processor can be selected from NVIDIA Jetson TX2, the entire environment perception system is connected with the basic unmanned wire control system of the unmanned vehicle through the CAN bus to control the vehicle to avoid risks in time to ensure the safety of unmanned driving.
[0094] In summary, the present invention provides an environment p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More