

Laser radar and camera synchronization method and device, equipment and storage medium
A lidar and camera technology, applied in the field of surveying and mapping, can solve the problem of not considering it, the lidar and the camera cannot be accurately synchronized, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
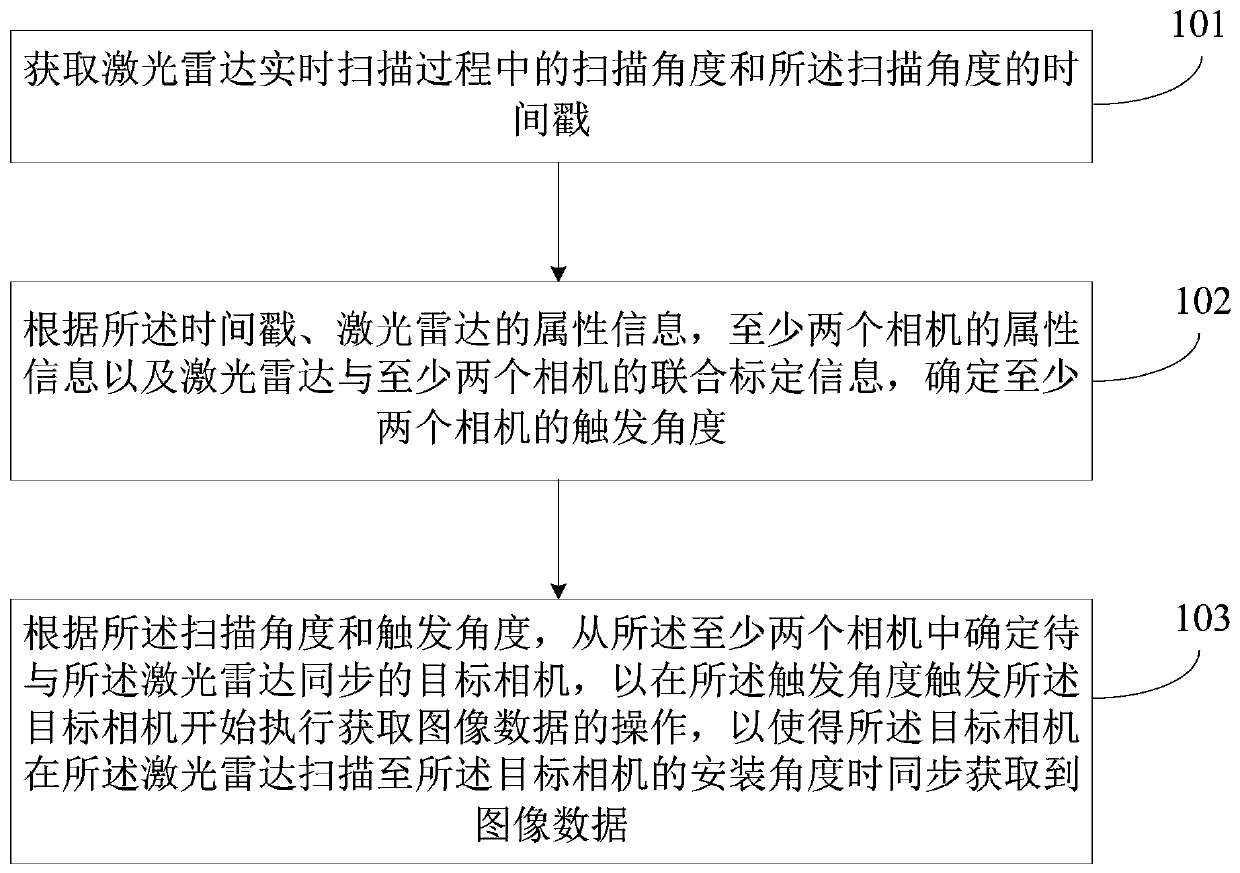
[0033] figure 1 It is a flow chart of the laser radar and camera synchronization method in Embodiment 1 of the present invention. This embodiment is applicable to solve the synchronization situation when the multi-line mechanical laser radar is used in combination with multiple cameras. The method can be performed by a laser radar and camera synchronization device, which can be implemented in software and / or hardware, and can be configured in a device. For example, the device can be a background server and other devices with communication and computing capabilities. Such as figure 1 As shown, the method specifically includes:
[0034] Step 101. Obtain the scanning angle and the time stamp of the scanning angle during the real-time scanning of the laser radar.
[0035] Among them, the laser radar is a radar system that emits laser beams to detect the position, speed and other characteristic quantities of the target. In the embodiment of the present invention, in order to anal...
Embodiment 2
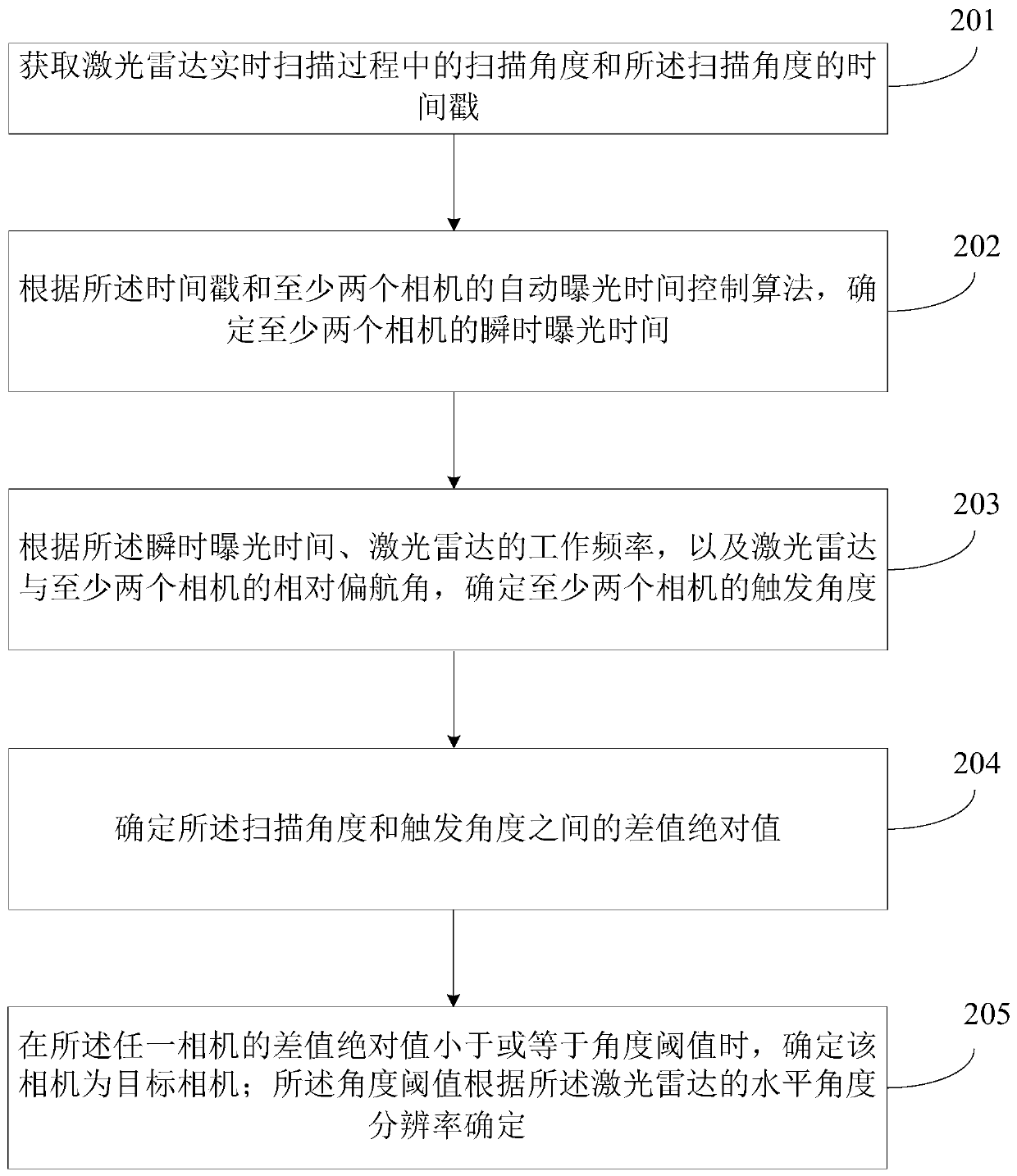
[0057] Fig. 2(a) is a flow chart of the method for synchronizing the lidar and the camera in the second embodiment of the present invention, and the second embodiment is further optimized on the basis of the first embodiment. As shown in Figure 2(a), the method includes:
[0058] Step 201. Obtain the scanning angle and the time stamp of the scanning angle during the real-time scanning of the laser radar.
[0059] Step 202: Determine the instantaneous exposure time of at least two cameras according to the time stamp and the automatic exposure time control algorithm of at least two cameras.
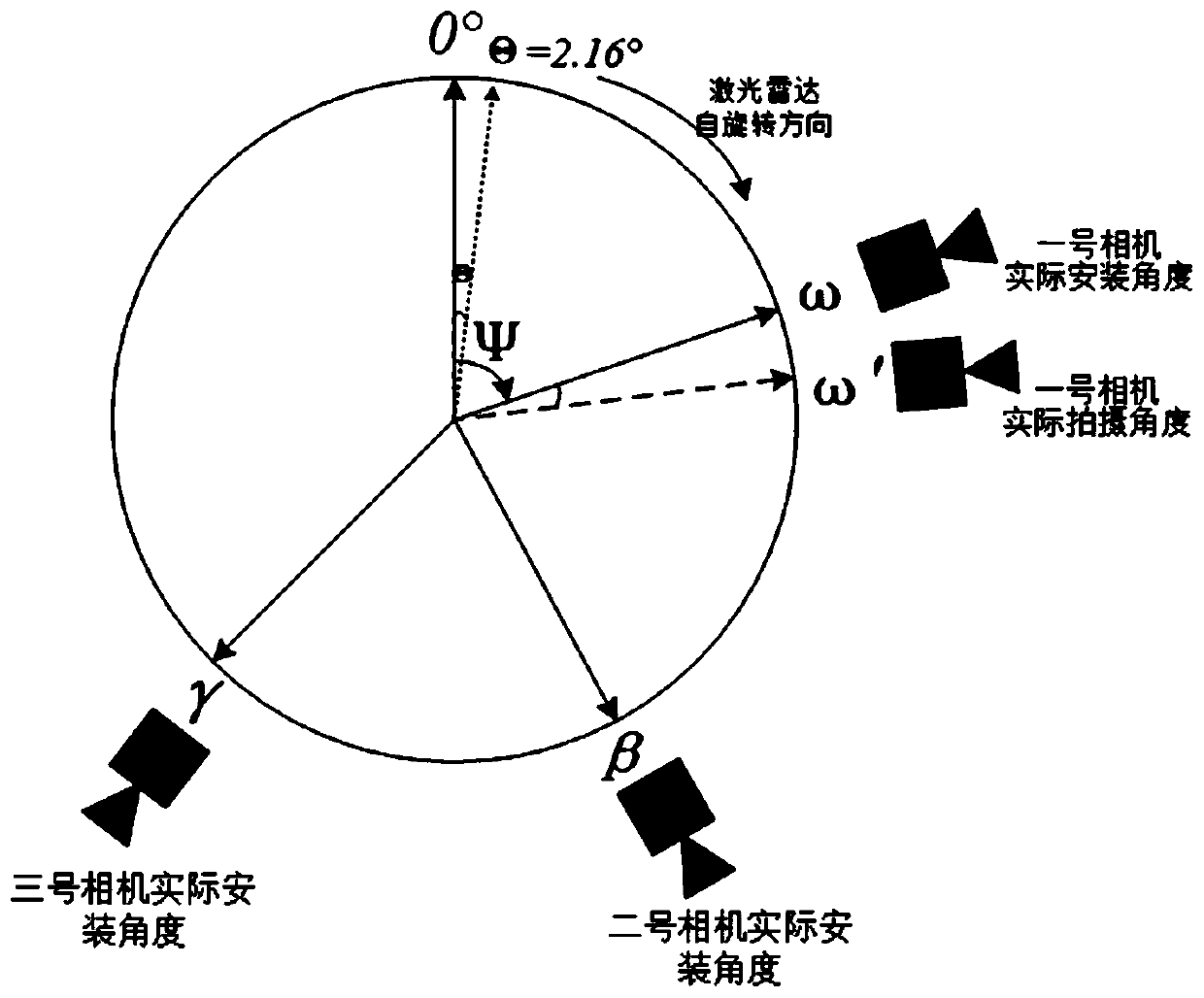
[0060] When triggering the camera to actually take pictures, due to the internal working principle of the camera, there will be a delay in the shooting of the camera. For example, the internal chip of the camera will have an automatic exposure time control algorithm, so that the actual shooting angle of the camera will be larger than the actual installation angle. error. Therefore, in ord...
Embodiment 3
[0080] image 3 It is a flow chart of the method for synchronizing the laser radar and the camera in the third embodiment of the present invention. This embodiment is applicable to solve the synchronization situation when the multi-line mechanical laser radar is used in combination with multiple cameras. The method can be performed by a laser radar and camera synchronization device, which can be implemented in software and / or hardware, and can be configured in a device. For example, the device can be a background server and other devices with communication and computing capabilities. Such as image 3 As shown, the method specifically includes:
[0081] Step 301. Obtain the scanning angle and the time stamp of the scanning angle during the real-time scanning of the lidar.
[0082] Step 302. Determine a target camera according to the scanning angle, joint calibration information of the lidar and at least two cameras.
[0083] According to the current scanning angle of the lid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More