

Binocular camera calibration method and device, equipment and medium
A binocular camera and calibration method technology, applied in the field of robotics, can solve problems such as difficult to give positional relationship, installation error measurement, etc., to achieve the effect of solving deviation and error and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
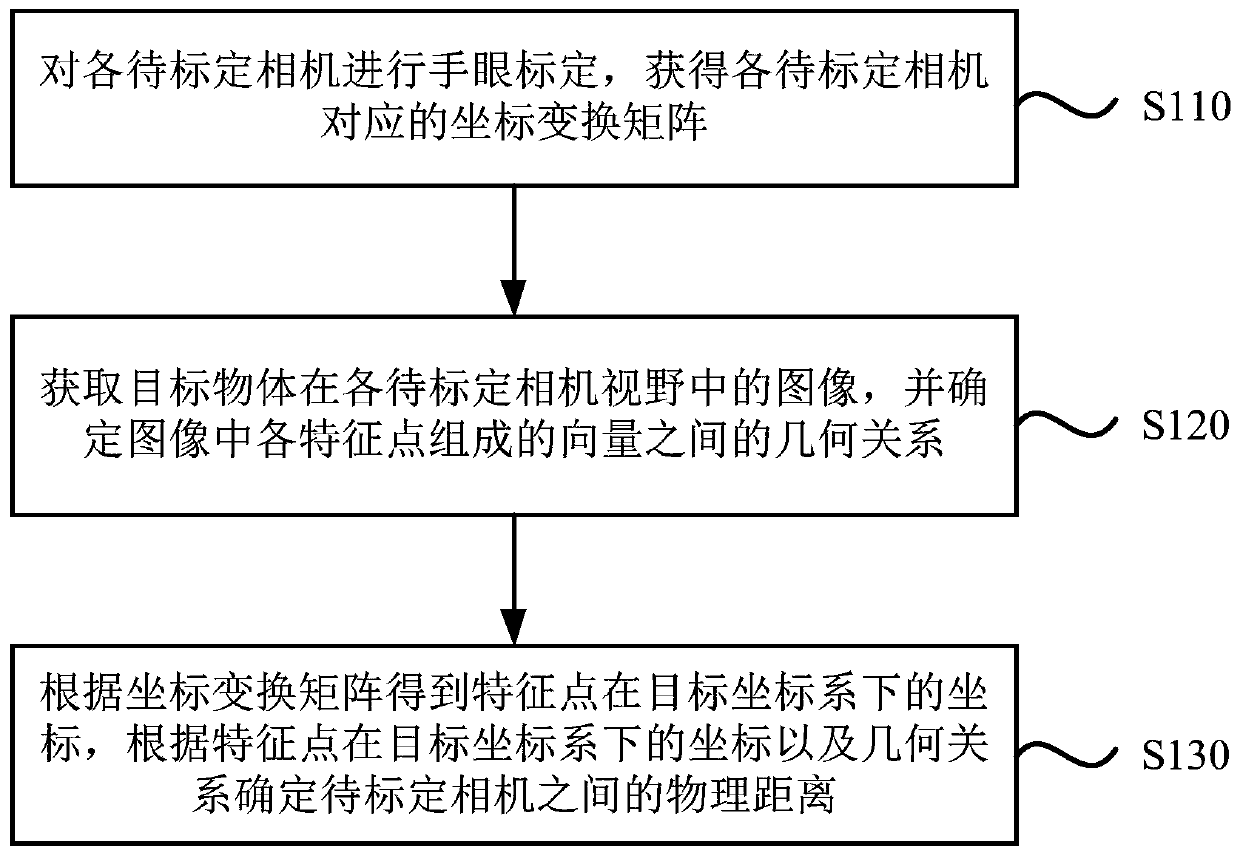
[0033] Figure 1a It is a flow chart of a binocular camera calibration method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of calibrating binocular cameras or multi-eye cameras. The method can be performed by a binocular camera calibration device, which can be implemented in software and / or hardware, for example, the binocular camera calibration device can be configured in a computer device. Such as Figure 1a As shown, the method includes:
[0034] S110. Perform hand-eye calibration on each camera to be calibrated, and obtain a coordinate transformation matrix corresponding to each camera to be calibrated.
[0035] In this embodiment, the physical distance between the cameras to be calibrated is determined by the moving distance of the robotic arm. The movement distance of the robotic arm can be further determined by the offset of the robotic arm when acquiring the image of the target object in the field of view of each c...
Embodiment 2
[0069] Figure 2a It is a flow chart of a binocular camera calibration method provided by Embodiment 2 of the present invention. This embodiment is further optimized on the basis of the foregoing embodiments. Such as Figure 2a As shown, the method includes:
[0070] S210. Perform hand-eye calibration on each camera to be calibrated to obtain a coordinate transformation matrix corresponding to each camera to be calibrated, wherein the camera to be calibrated includes a first camera and a second camera.
[0071] S220. Acquire a first image of the target object in the field of view of the first camera, and a second image of the target object in the field of view of the second camera.
[0072] In this embodiment, the target object can be a checkerboard calibration object, and the checkerboard calibration object is placed at the center of the first camera and the second camera, and the mechanical arm is moved to obtain the positions of the checkerboard calibration object in the...
Embodiment 3
[0093] Figure 3a It is a flow chart of a binocular camera calibration method provided by Embodiment 3 of the present invention. This embodiment provides a preferred embodiment on the basis of the foregoing embodiments. Such as Figure 3a As shown, the method includes:
[0094] S310, setting the binocular camera, and adjusting the position of the mechanical arm.
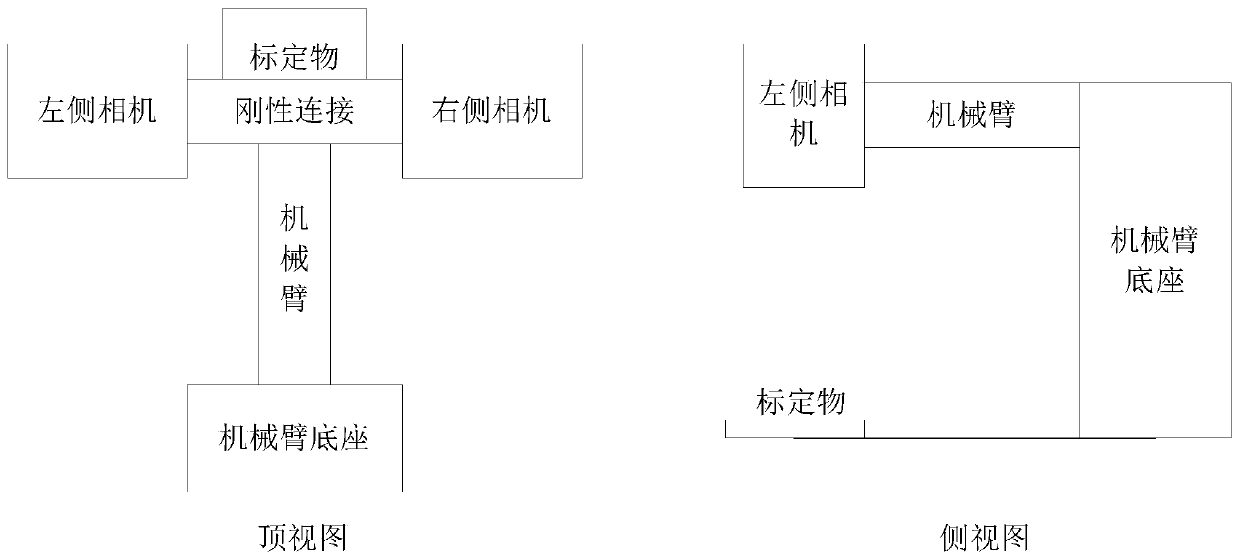
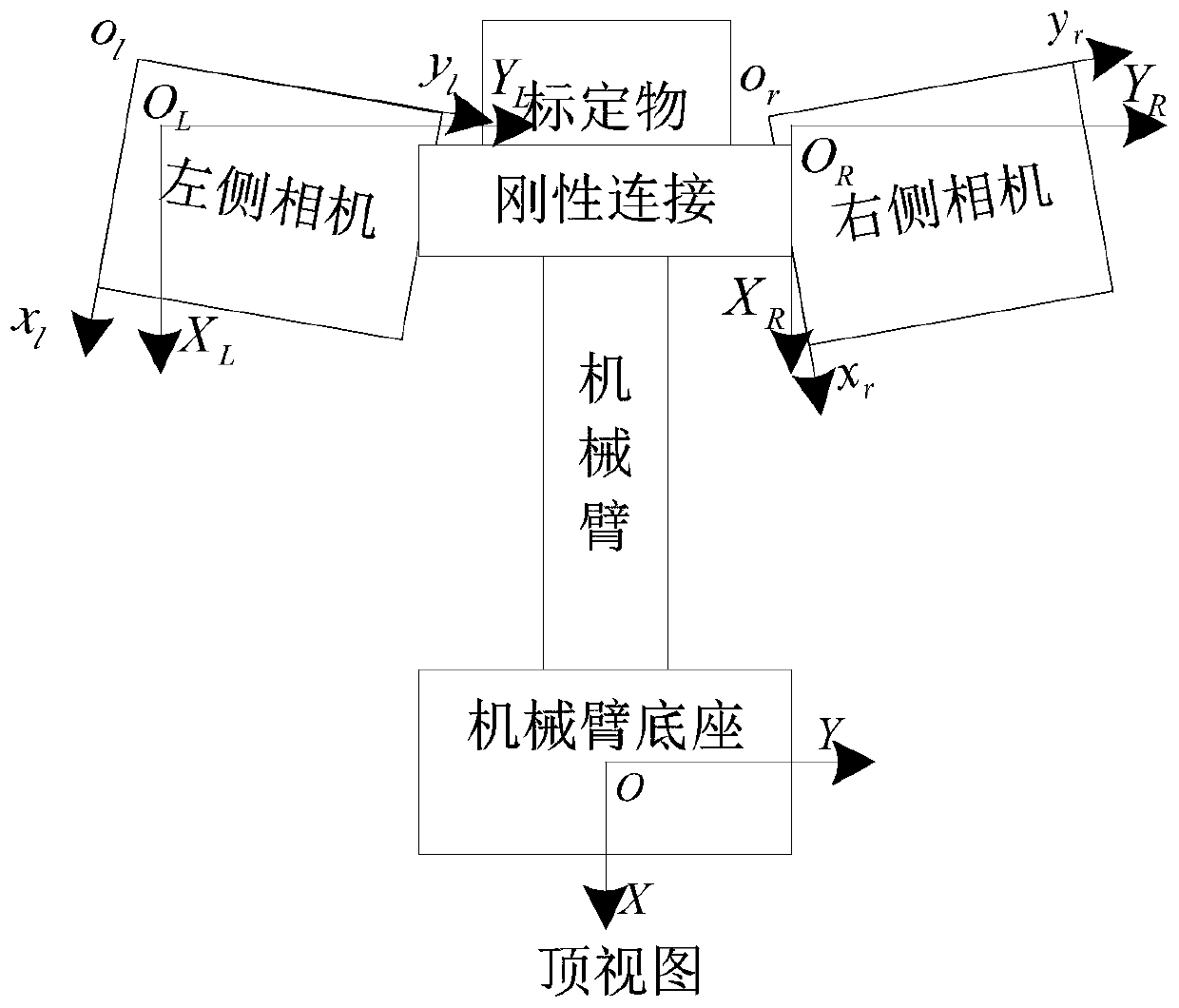
[0095] Install the two cameras on the bracket driven by the robotic arm, the cameras are rigidly connected, and the relative positions will not change. When installing, you only need to ensure that the camera is in the same direction, and there is no need to ensure that it is completely parallel. The bracket can be translated in the XY direction under the drive of the mechanical arm, and the camera will not rotate during the translation process. Among them, the position of the calibration object should be placed properly. When the left camera moves over the calibration object, the calibration object can complet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More