

Path planning method and system of grinding and polishing robot based on curved surface repairing
A path planning and robot technology, applied in grinding/polishing equipment, grinding machines, prediction, etc., can solve problems affecting the surface roughness of workpieces, lack of mathematical basis, path curve deviation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings, but the present invention is not limited in any way, and any transformation made based on the teaching of the present invention falls within the protection scope of the present invention.
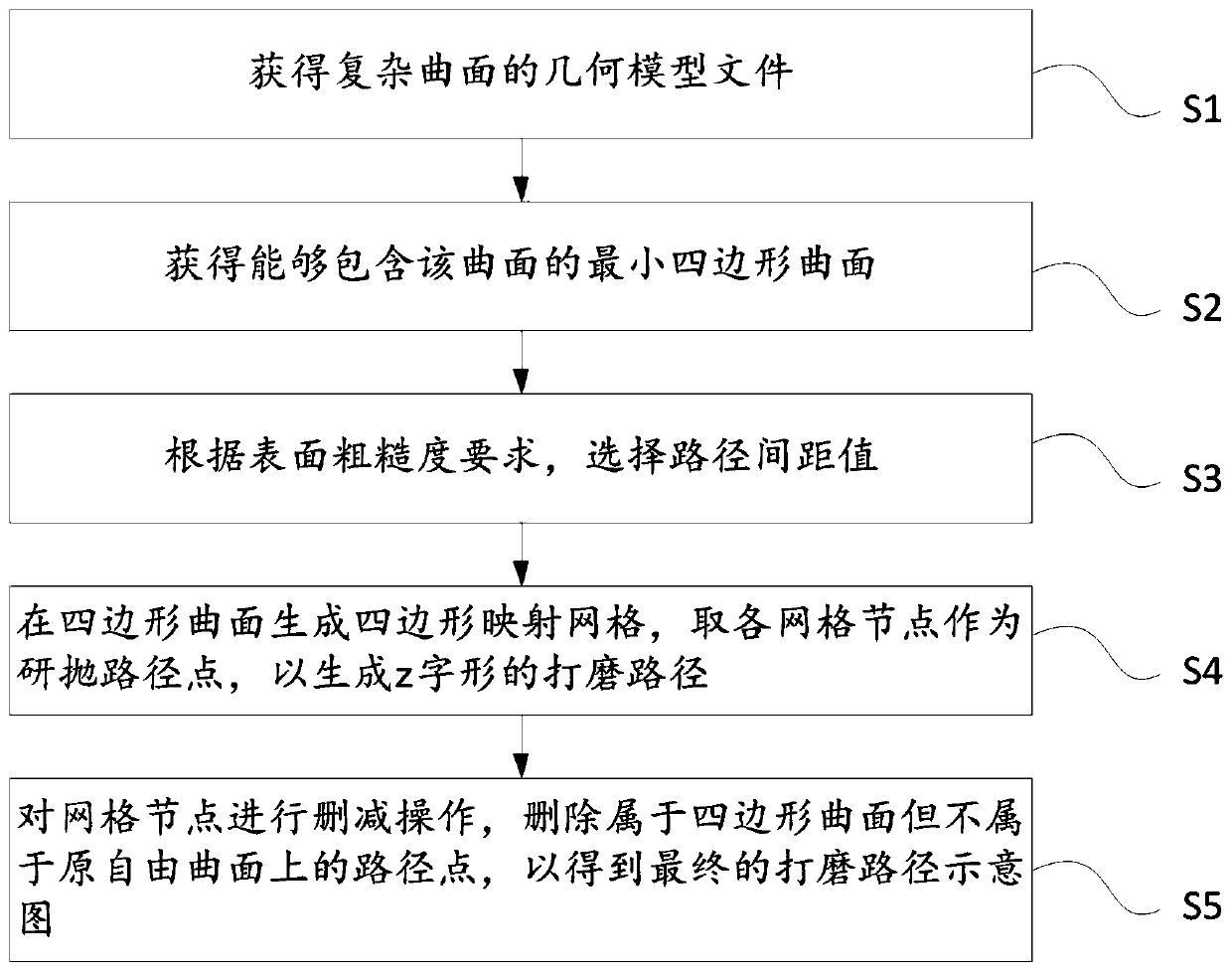
[0028] Please refer to figure 1 As shown, it is a flow chart of a preferred embodiment of a path planning method for a grinding and polishing robot based on surface repair according to the present invention. A preferred embodiment of the path planning method of a grinding and polishing robot based on surface repairing according to the present invention includes the following steps:
[0029] Step S1: Reconstruct the complex surface to obtain a geometric model file of the complex surface. In this embodiment, a reverse engineering method may be used to reconstruct the complex curved surface to obtain a geometric model file of the complex curved surface.
[0030] Step S2: Patching the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More