Teleoperation control method and system based on virtual reality compensation time delay
A remote operation control and virtual reality technology, applied in image data processing, instruments, etc., can solve the problems of no virtual and real camera calibration and registration, lack of feature position matching and correction, inability to achieve teleoperation experience, etc. Image transmission delay, avoid system problems, enhance the effect of realism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
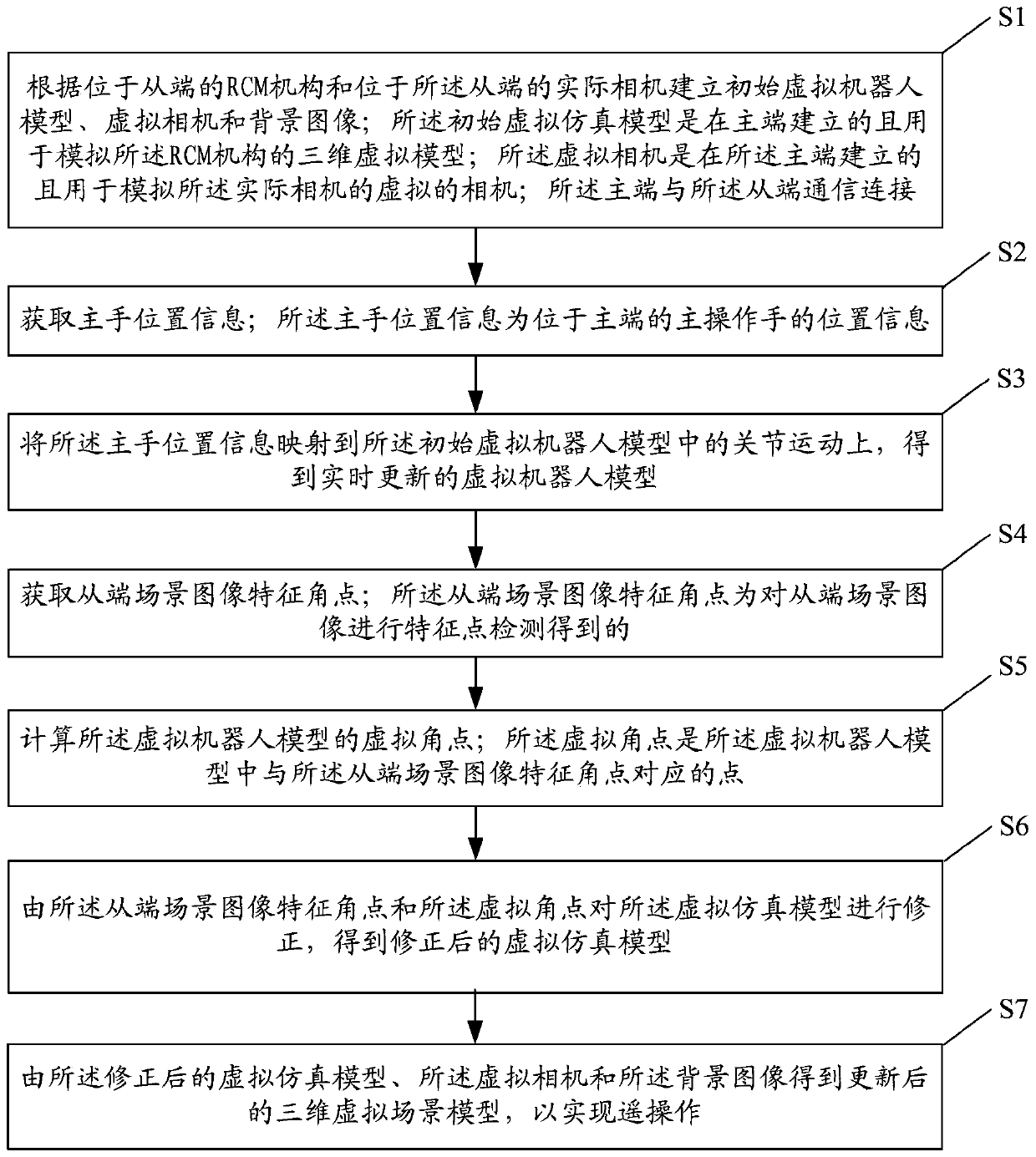
[0072] figure 1 It is a flow chart of a teleoperation control method based on virtual reality to make up time delay according to Embodiment 1 of the present invention. see figure 1 , the remote operation control method based on virtual reality to make up for time delay in this embodiment includes:
[0073] Step S1: Establish an initial virtual robot model, a virtual camera and a background image according to the RCM mechanism at the slave end and the actual camera at the slave end; the initial virtual simulation model is established at the master end and used to simulate the RCM mechanism A three-dimensional virtual model; the virtual camera is a virtual camera established on the master end and used to simulate the actual camera; the master end communicates with the slave end.
[0074] In this embodiment, the actual camera is a global camera.
[0075] The step S1 specifically includes:
[0076] 11) Create a virtual RCM mechanism model using the OpenInventor graphics librar...
Embodiment 2
[0104] The teleoperation control method based on virtual reality to make up time delay in this embodiment is mainly divided into the construction of virtual environment and the virtual and real fusion of graphics and images. Based on the kinematics analysis of the slave RCM robot, the virtual simulation model of the master is established by using the OpenInventor graphics library. . Camera parameter calibration and corresponding image feature point recognition are performed on the actual global camera at the slave end. The virtual-real fusion technology is based on the detected image feature points, overlapping the virtual robot model with its actual image, and the rest of the image is used as the background of the model to simulate the surrounding environment, and continuously corrects the distance between the model and the image plane during the movement process. Relative deviation. The specific ideas are as follows:
[0105] First, build a virtual environment, which is a ...
Embodiment 3
[0143] This embodiment provides a teleoperation control system based on virtual reality to make up time delay, including:
[0144] Model construction module, for establishing initial virtual robot model, virtual camera and background image according to the RCM mechanism positioned at slave end and the actual camera positioned at said slave end; Said initial virtual simulation model is set up at master end and is used for simulating said A three-dimensional virtual model of the RCM mechanism; the virtual camera is a virtual camera established on the master end and used to simulate the actual camera; the master end communicates with the slave end.
[0145] The position information acquiring module is used to acquire the position information of the main hand; the position information of the main hand is the position information of the main operator located at the main end.
[0146] A model control module, configured to map the main hand position information to joint motions in th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More