

A kind of mechanical finger and mechanical finger driving method based on magnetorheology
A technology of mechanical fingers and driving methods, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., and can solve the problems of easily damaged objects, no clamping form, poor clamping stability of mechanical fingers, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0045] This embodiment discloses a mechanical finger based on magnetorheology.
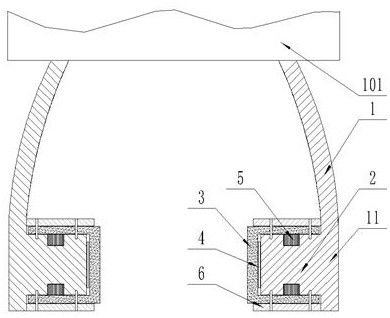
[0046] like figure 1 Shown: a mechanical finger based on magnetorheology, including a finger body 1, a drive unit for driving the finger body 1 to apply a clamping force to a target, and a control unit electrically connected to the drive unit;
[0047] The clamping part 11 of the finger body 1 has a contact end facing the target and used to contact the target when in use; the position of the contact end is fixed with a magnetorheological elastic part 3 covering the end surface of the contact end; the magnetorheological elastic part 3 There is a gap fit between the side facing the contact end and the end face of the contact end, and a pressure sensing component 4 connected to the control unit signal is correspondingly provided in the gap between the magneto-rheological elastic part 3 and the contact end; the clamping part 11 An electromagnetic coil assembly 5 electrically connected to the control ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More