

Transplanting robot suitable for hydroponic seedlings
A robot and hydroponic technology, applied in the direction of transplanting machinery, cultivation, manipulators, etc., can solve the problems of high labor intensity, complex structure, low efficiency, etc., and achieve the goal of reducing labor costs, improving transplanting efficiency, and improving grasping accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
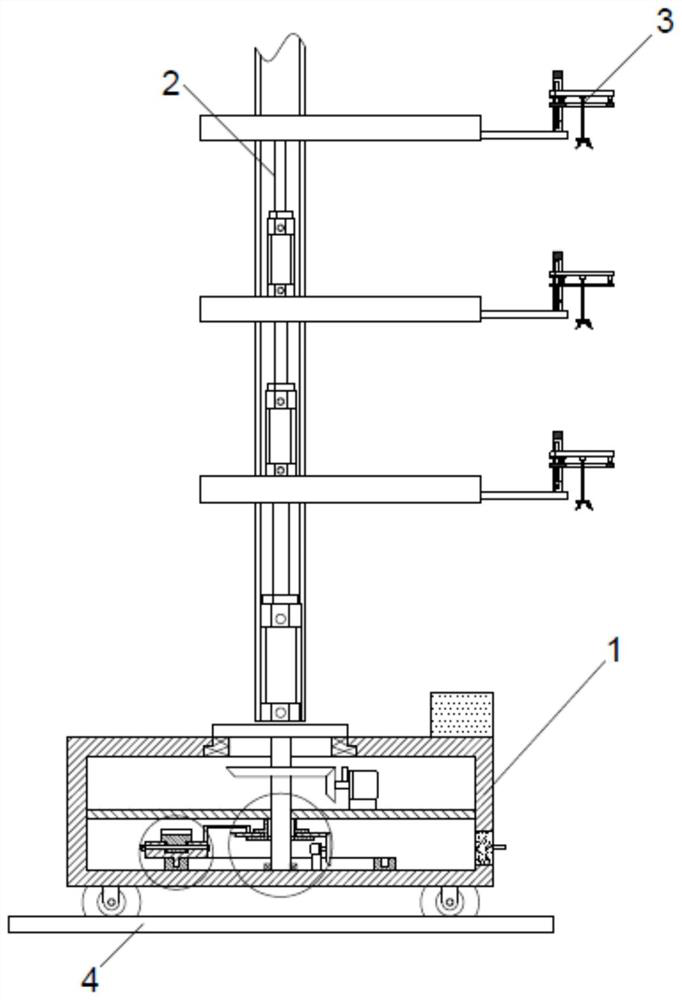
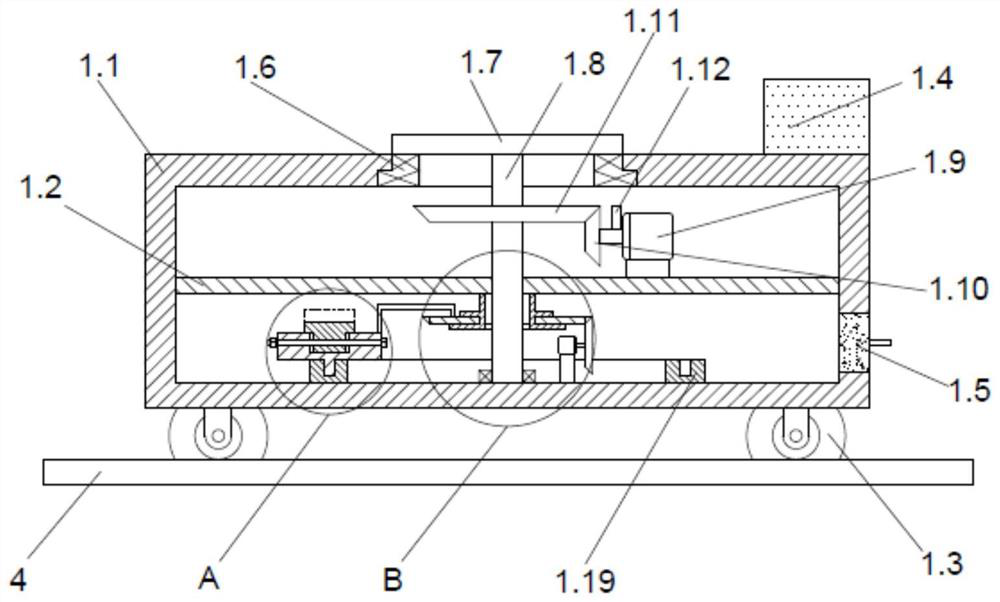
[0045] see Figure 1-17 , the embodiment of the present invention provides a transplanting robot suitable for hydroponic seedlings, AGV logistics trolley 1, mechanical arm 2 and hydroponic sponge grabbing device 3, AGV logistics trolley 1 includes bottom box 1.1, guide wheel 1.3 and guide rail 4, The bottom of the bottom box 1.1 is provided with a number of guide wheels 1.3, and guide rails 4 are laid between the hydroponic racks in the greenhouse. The guide wheels 1.3 are matched with the guide rails 4. The drive system for driving the AGV logistics trolley 1 is the prior art, so it will not be described here. repeat.
[0046] The middle part of the bottom box 1.1 is provided with a middle partition 1.2, the middle partition 1.2 is fixed ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More