High-quality motion path generating method of mechanical arm
A motion path and robotic arm technology, applied in the field of high-quality motion path generation of robotic arms, can solve problems such as the inability to meet robotic arms, and achieve the effects of satisfying actual work requirements, reducing errors, and making the process simple and clear.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The specific implementation manner of the present invention will be described in detail below in conjunction with the accompanying drawings and technical solutions.
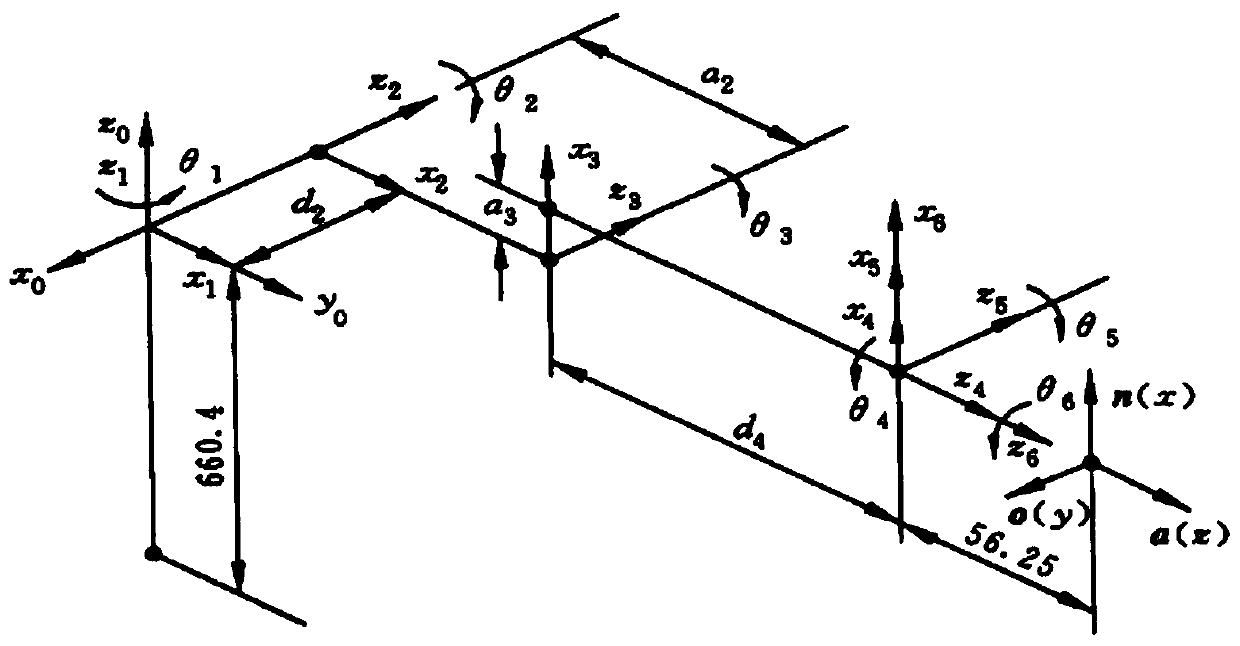
[0030] attached figure 2 It is a simplified structural diagram of the classic PUMA560 manipulator, and the connecting rod parameters of the manipulator determined by the DH parameter method are shown in Table 1.
[0031] Table 1
[0032]
[0033]
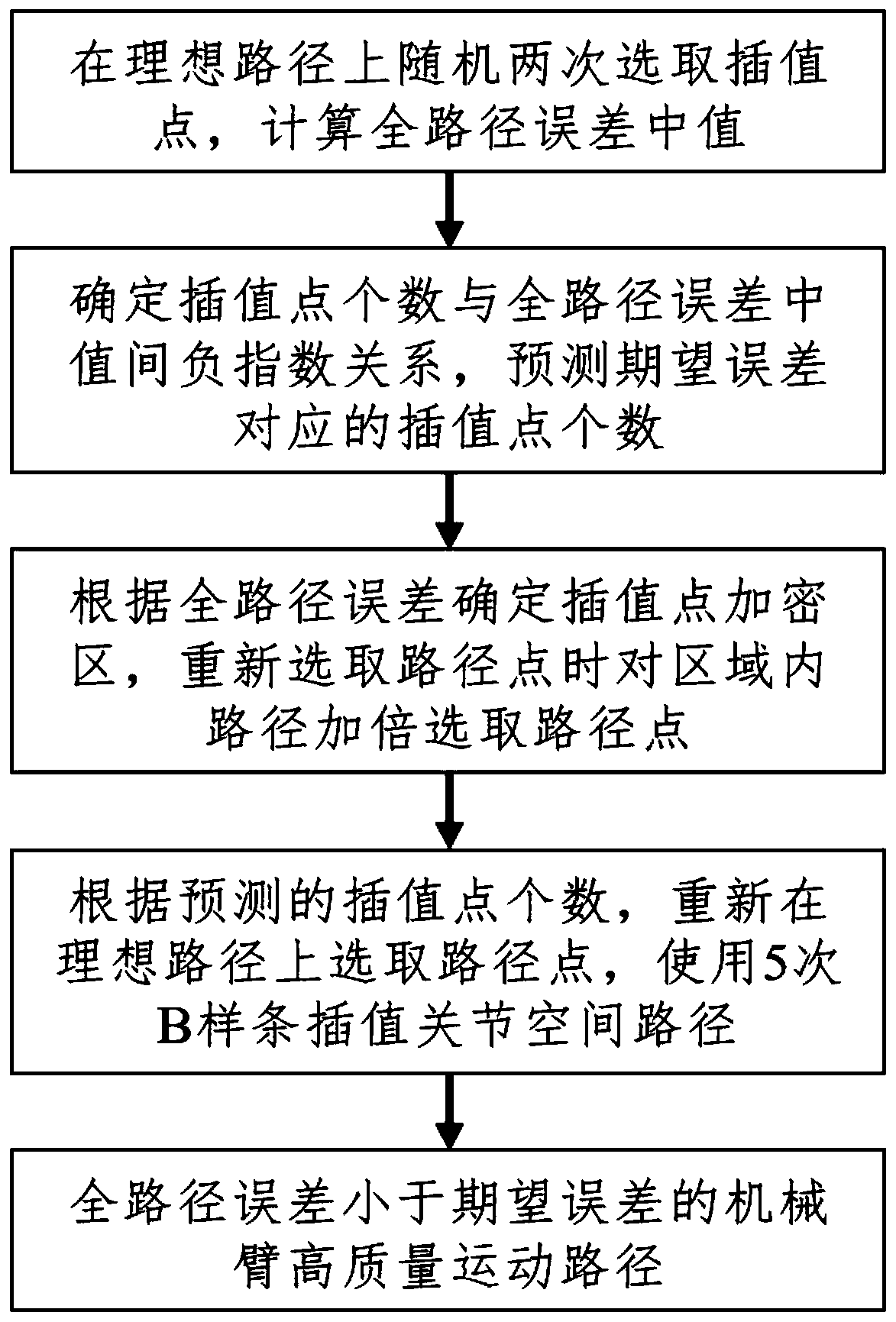
[0034] attached figure 1 It is a flowchart of a method for generating a high-quality motion path of a mechanical arm in the present invention, and the specific steps of the method are as follows:
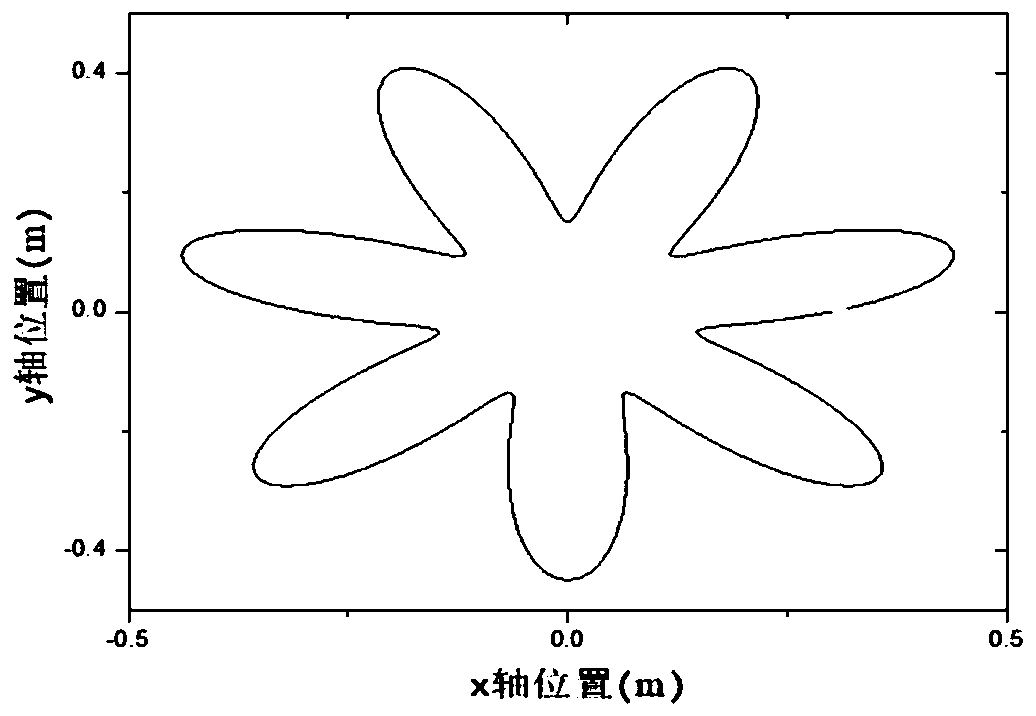
[0035] Step 1, according to the formula (1) to construct as attached image 3 The ideal path of the manipulator shown is a planar path, l takes a value of 0.15, and the expression in polar coordinates is:
[0036] ρ=0.15(sin(7θ)+2)
[0037] According to the formula (2), the constructed planar geometric path is converted into the path of the manipulator works...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More