

Control method and device
A control method and control law technology, applied in the aerospace field, can solve the problems of slow convergence speed and control accuracy to be improved, and achieve the effect of improving the convergence speed and system control accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
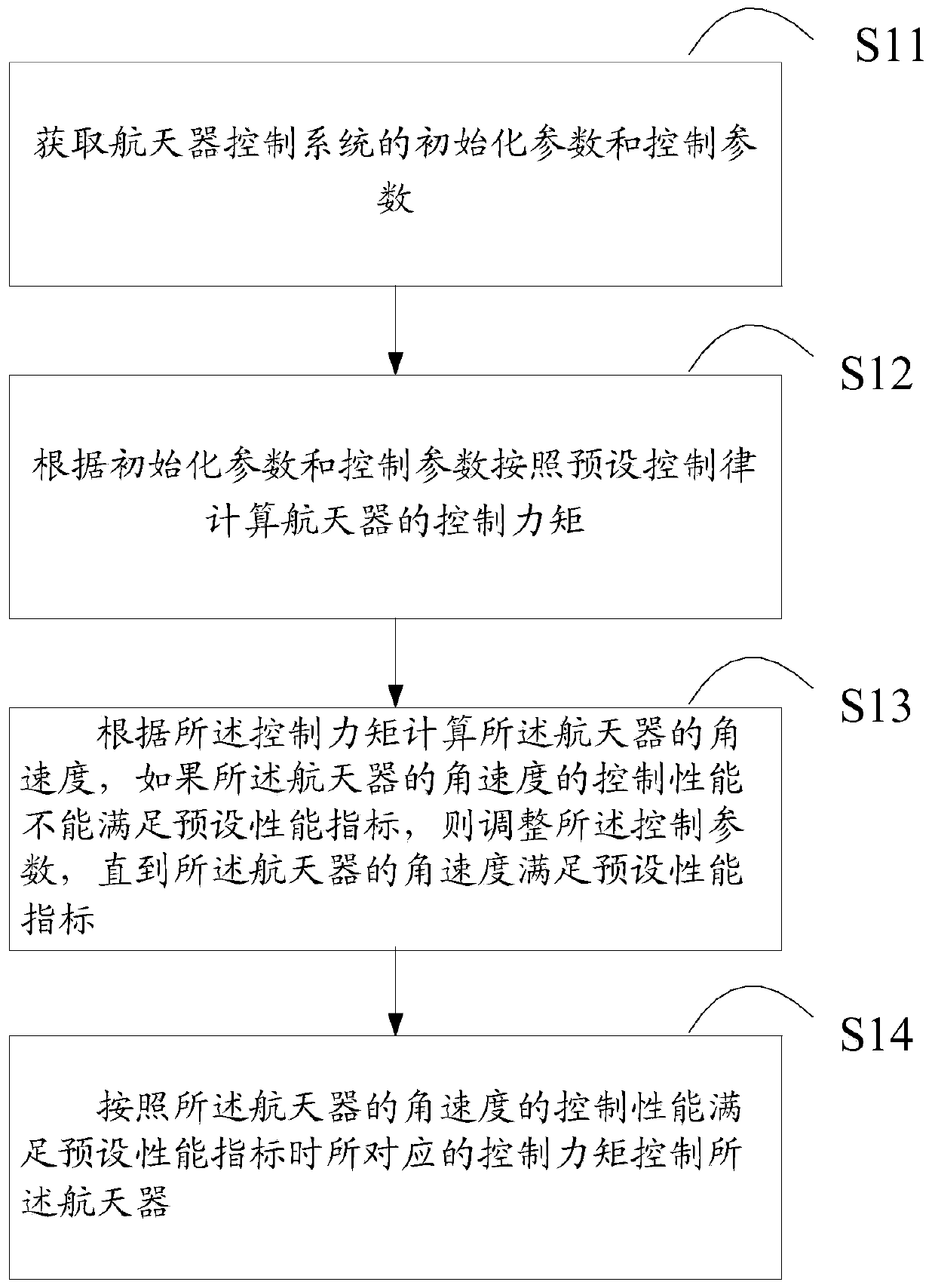
[0065] figure 1 It is a schematic diagram of the control method in Embodiment 1 of the present invention, such as figure 1 As shown, the control method of this embodiment includes:
[0066] S11. Obtain initialization parameters and control parameters of the spacecraft control system.
[0067] In an exemplary embodiment, the initialization parameters include the spacecraft initial angular velocity ω, the spacecraft inertia matrix J;
[0068] Among them, the initial angular velocity ω=[ω x ω y ω z ] T ; x is the x-axis angular velocity of the spacecraft body coordinate system, ω y is the y-axis angular velocity of the spacecraft body coordinate system, ω z is the z-axis angular velocity of the spacecraft body coordinate system; the spacecraft body coordinate system is a coordinate system in which the spacecraft center of mass is the coordinate origin, and the x-axis, y-axis and z-axis coincide with the main axis of inertia of the spacecraft; the definition of the space...
Embodiment 2
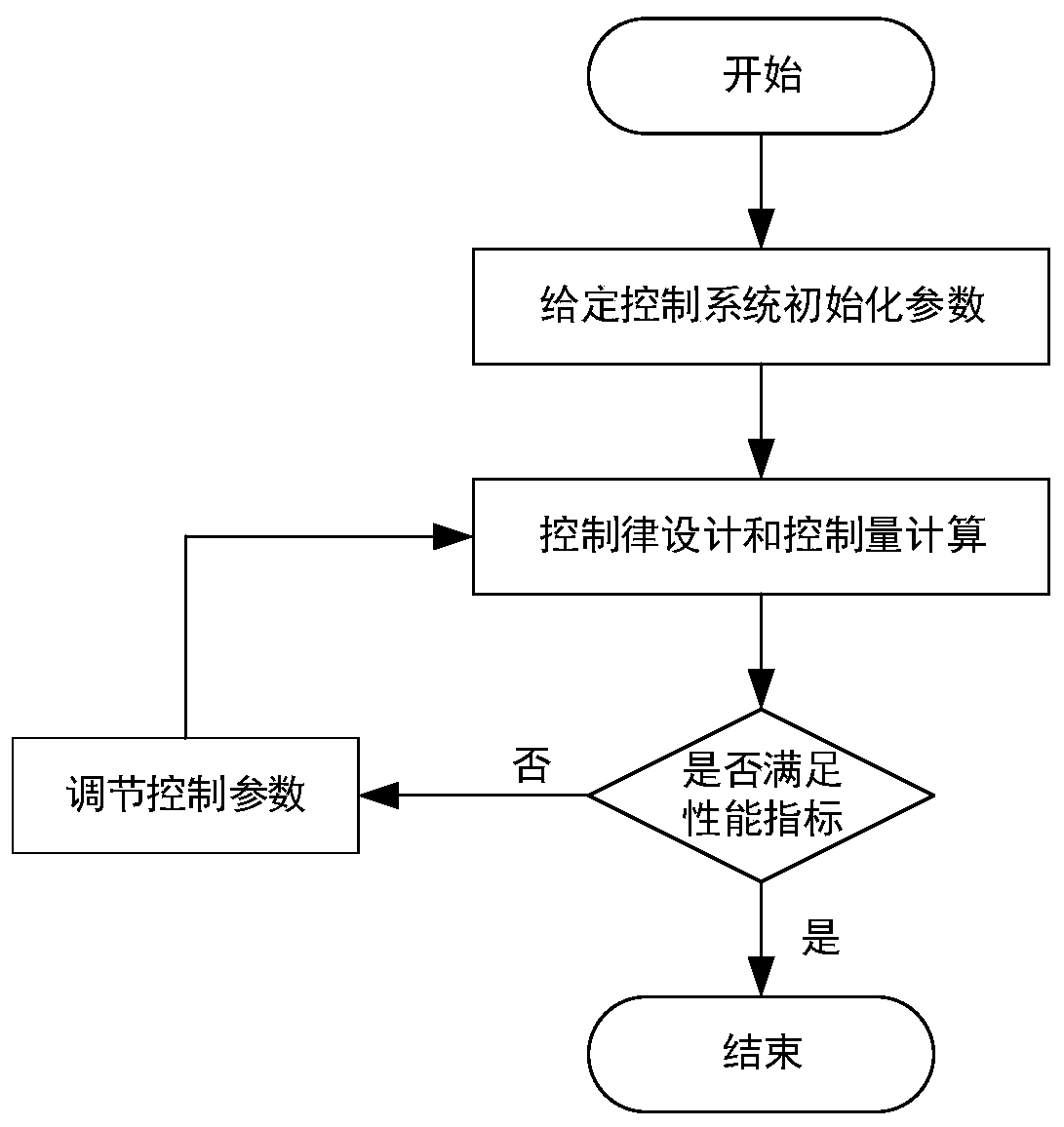
[0092] The design idea of the present invention is as follows: first, the initialization parameters of the control system are given, including the spacecraft inertia matrix and the initial angular velocity. Then, based on the initialization parameters, the sliding mode control method is used to design the control law and calculate the actual control quantity. Finally, determine whether the control performance (such as convergence time, steady-state accuracy, etc.) meets the requirements. If it is satisfied, then end the derotation control, otherwise, adjust the control parameters until the performance index requirements are met and stop. In practical applications, the angular velocity of the spacecraft can be obtained by the attitude measurement equipment, and the control quantity calculated by this method can be transmitted to the actuator to realize the limited time derotation control function of the underactuated spacecraft.
[0093] Concrete steps of the present inventi...
Embodiment 3
[0162] Figure 5 It is a schematic diagram of the control device of the embodiment of the present invention, such as Figure 5 As shown, the control device of this embodiment is applied to an underactuated spacecraft, including: a memory and a processor;
[0163] The memory is used to save the program for control;
[0164] The processor is configured to read and execute the program for controlling, and perform the following operations:
[0165] Obtain the initialization parameters and control parameters of the spacecraft control system;
[0166] Calculate the control moment of the spacecraft according to the preset control law according to the initialization parameters and control parameters;
[0167] calculating the angular velocity of the spacecraft according to the control torque, if the control performance of the angular velocity of the spacecraft cannot meet the preset performance index, adjusting the control parameters until the angular velocity of the spacecraft meet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More