

Humanoid robot gait planning deep reinforcement learning new method
A humanoid robot and reinforcement learning technology, which is applied in the new field of deep reinforcement learning of humanoid robot gait planning, to achieve the effect of enhancing stability and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
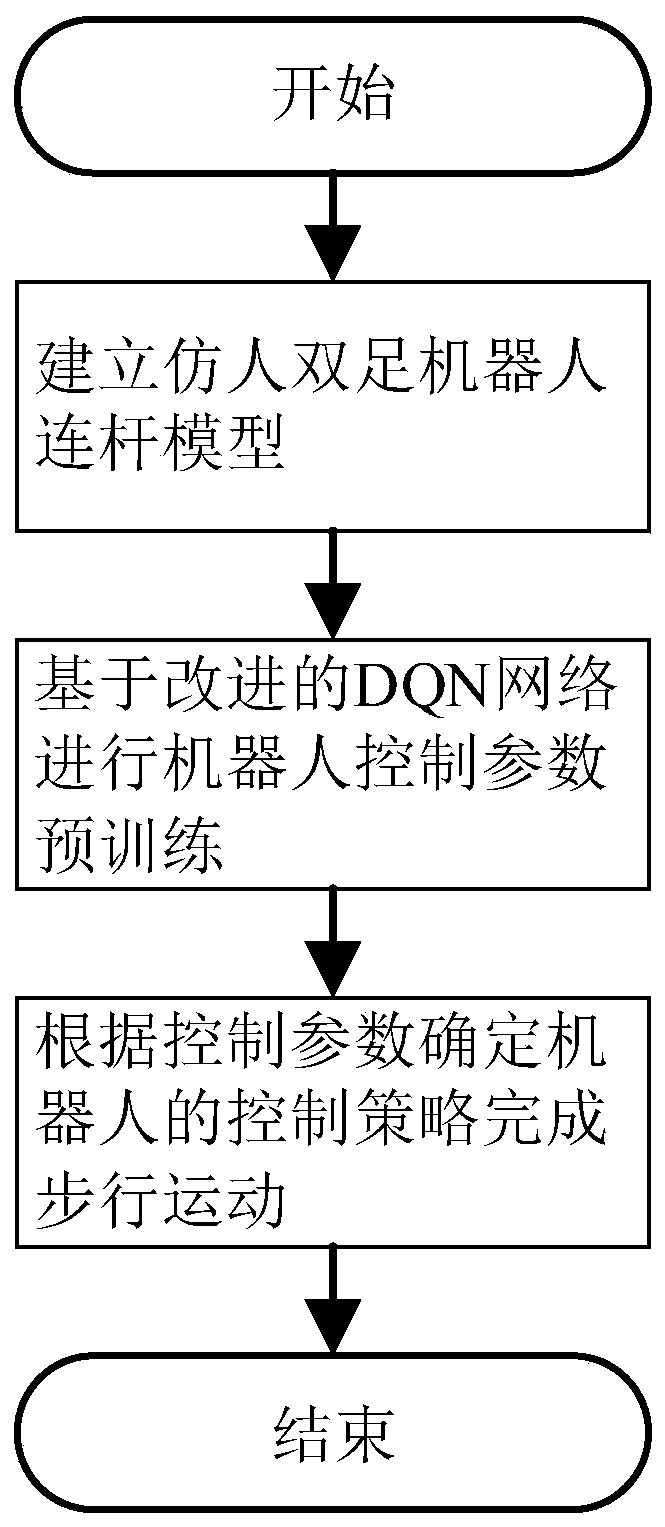
[0055] Such as figure 1 As shown, a new deep reinforcement learning method for humanoid robot gait planning of the present invention includes establishing a humanoid biped robot model, pre-training control parameters and biped robot walking motion.
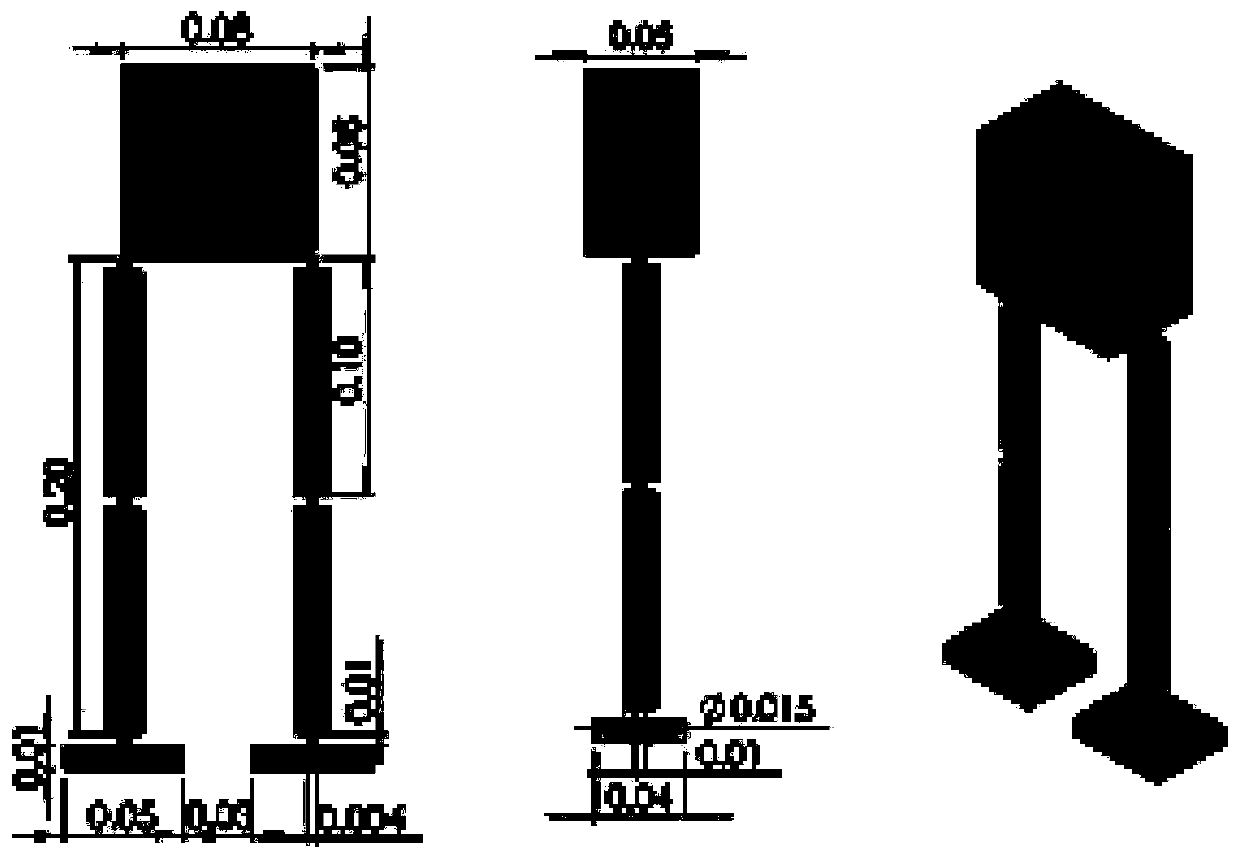
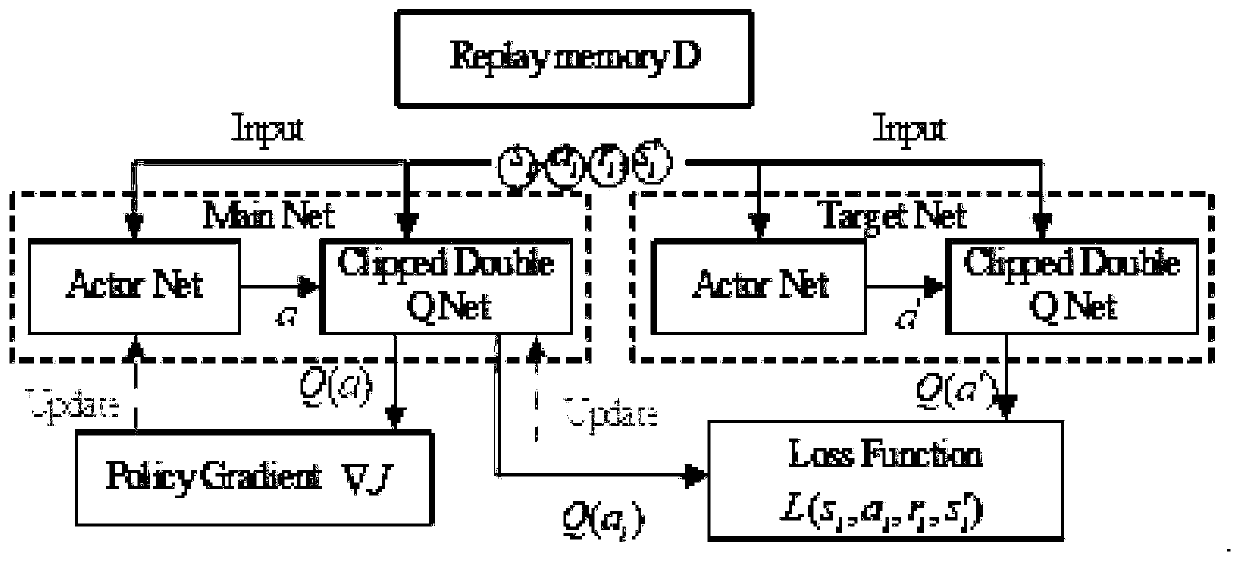
[0056] Among them, the humanoid biped robot model uses a simplified 6-DOF linkage model, and the foot adopts a planar plantar structure; the pre-training control parameters use an improved DQN (Deep-Q-Network) network structure The deep reinforcement learning of the controller is trained; the stability of the biped robot's walking motion is mainly guaranteed by the trained controller. First of all, it is necessary to u...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Density | aaaaa | aaaaa |
| Density | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More