

Robot indoor positioning method based on double-color bar and QR code
An indoor positioning and robot technology, applied in instruments, computer parts, image data processing and other directions, can solve the problems of high cost, insufficient precision, and difficult to achieve, and achieve the effect of high color saturation, high reliability, and easy identification.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
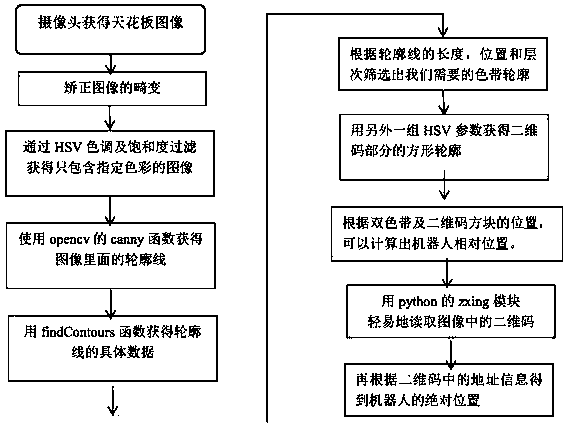
[0030] Example 1: see figure 1 , a robot indoor positioning method with two-color bar and two-dimensional code,
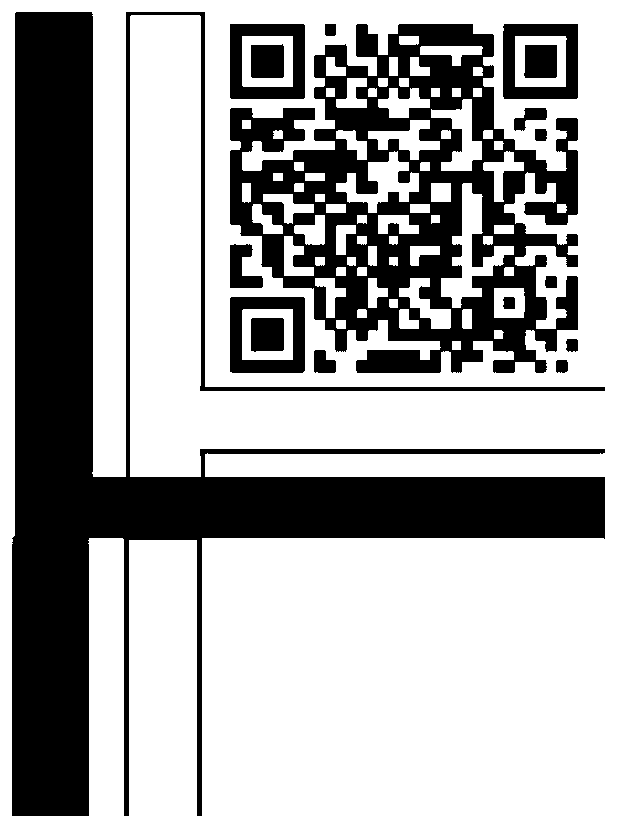
[0031] Step 1. Paste a two-color bar positioning mark on the indoor ceiling along the predetermined route of the robot, and paste a two-dimensional code with position information on the starting point, end point, and intersection point of the two-color bar, and use the starting point, end point, and intersection point place and serve as a docking point for the robot;
[0032] The two-color bar positioning mark includes two color bands parallel to each other with a certain distance, and the color is selected with a relatively high saturation color. For example: red and green, it is stipulated that along the forward direction, red is on the left and green is on the right. The two navigation bars are parallel and keep a certain distance. In this way, the left and right positions of the robot can be calculated after identification. According to the left and right di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More