

Crop picking system based on instance segmentation and path planning
A technology for path planning and crops, applied in harvesting machines, control/regulation systems, agriculture, etc., can solve the problems of long path search time, poor shape recognition effect, low detection accuracy, etc., and achieve fast image segmentation and grasping accuracy The effect of high, segmentation precision and high mask precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
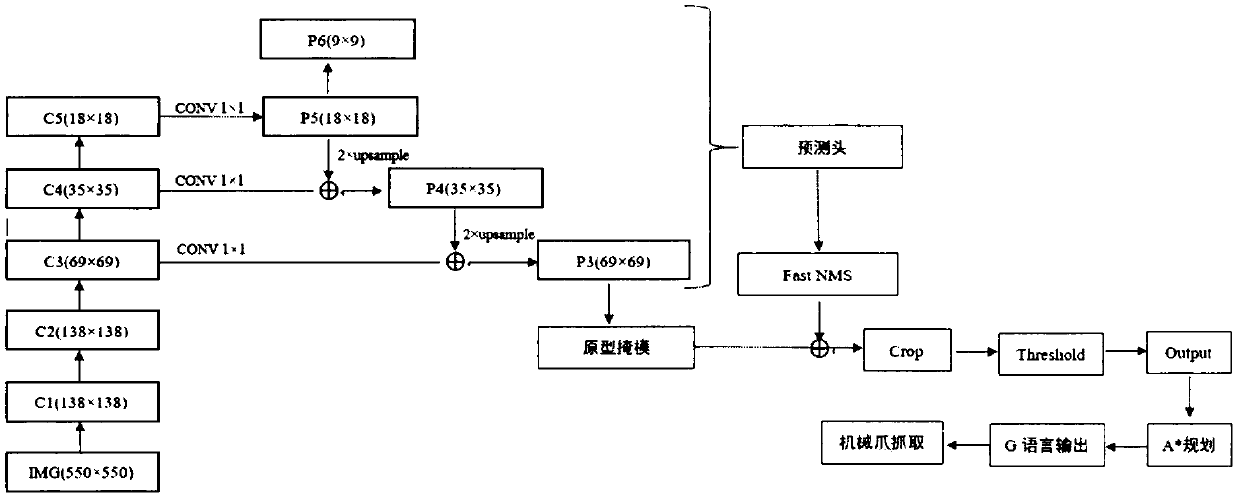
[0018] The purpose of the present invention is to use a computer to quickly locate the crops, identify the contours of the crops as accurately as possible and output the contour coordinates. Based on this coordinate, the manipulator can move with higher efficiency and pick crops accurately.
[0019] First, if figure 1 , input crop images to ResNet-101 and output C1-C5. To generate more robust masks and improve the detection accuracy of small objects, a Feature Pyramid Network (FPN) is required. In this process, after 1×1 convolution, C5 generates P5. After bilinear interpolation and amplification, C4 is added to obtain P4, and C4 is convolved with 1×1. Similarly, P3 is also generated. P5 is convolved with 3×3 to get P6. In order to avoid over-detection leading to mask coverage or repeated segmentation, the convolution is not continued to generate P7. The image size and number of channels are shown in Table 1. As the deepest layer, P3 can be considered as a template, wh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More