

Control method of intelligent automobile under variable adhesion coefficient repetitive track
A technology of adhesion coefficient and smart cars, which is applied in the direction of control devices, vehicle components, and external condition input parameters, can solve problems such as reduced accuracy, vehicle instability, and improved driving speed and track tracking accuracy, so as to improve emergency response capabilities and improve Tracking accuracy and the effect of improving driving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0072] A control method for a smart car under variable adhesion coefficient repetitive trajectory, comprising the steps of:
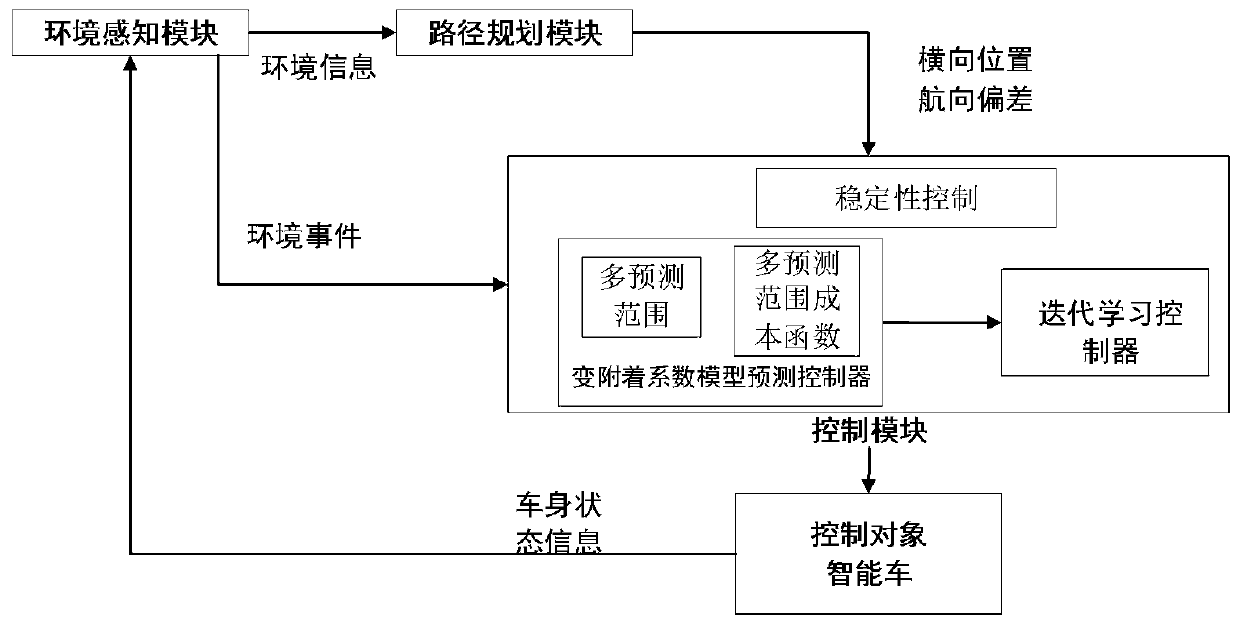
[0073] Step 1, design the environment perception module.
[0074] Real-time collection of road information ahead of smart cars, combined with perception technology to collect traffic road information such as ice and snow, pedestrians on the side of the road or sudden stop of the vehicle in front and other road conditions in real time and transmit them to the control module for the controller to call in advance.
[0075] Step 2, design the variable adhesion coefficient model prediction (MPC) module.
[0076] The present invention uses a three-degree-of-freedom vehicle dynamics model, including longitudinal motion (X-axis direction), lateral motion (Y-axis direction) and yaw motion (rotation direction around th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More