Mapping method and device based on multi-line laser radar, medium and equipment
A multi-line laser and laser radar technology, which is applied in the direction of measuring devices, electromagnetic wave reradiation, radio wave measurement systems, etc., can solve problems that cannot be modeled as obstacles, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present invention will be described in detail below with reference to the accompanying drawings and examples.
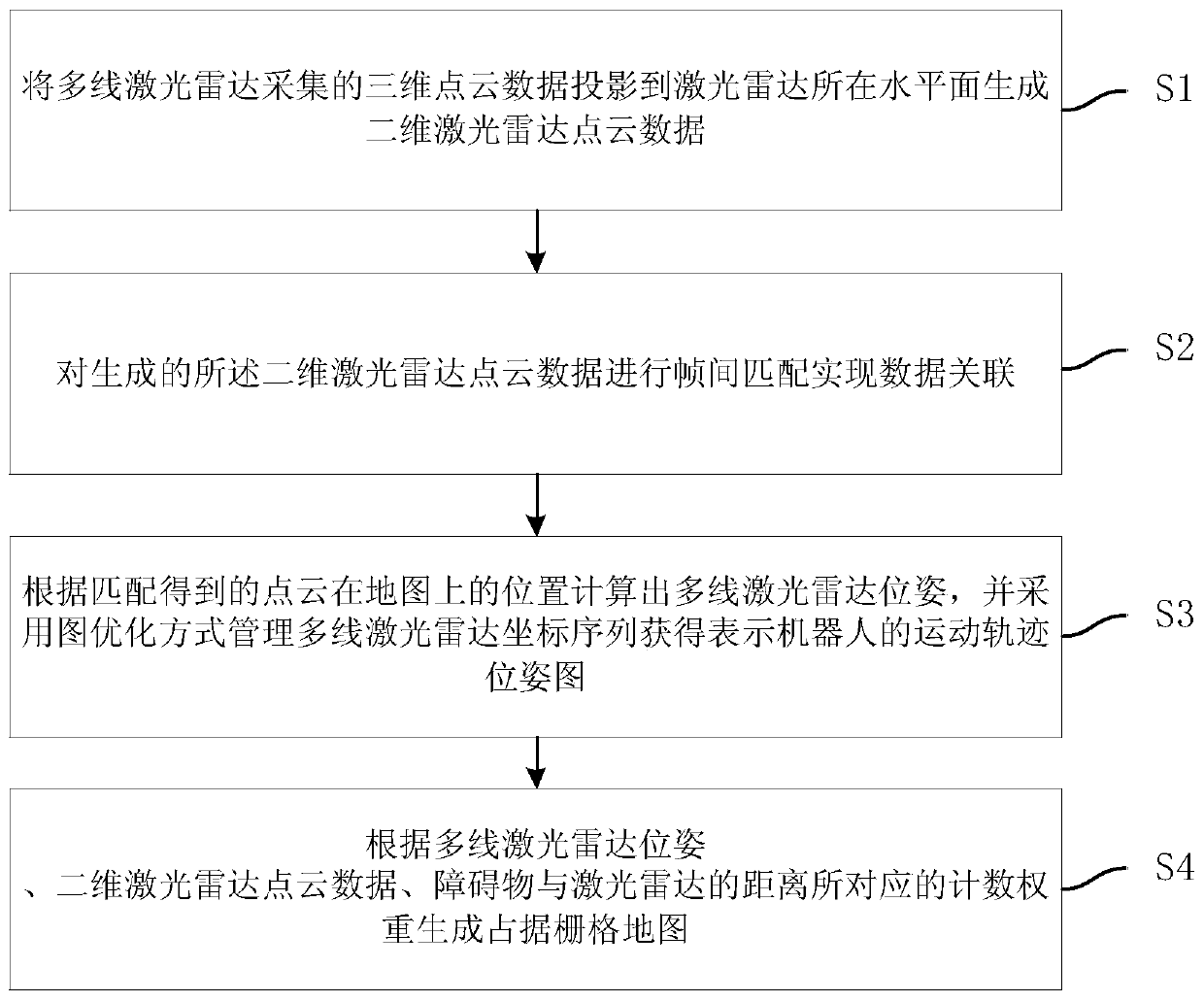
[0048] refer to figure 1 , the preferred embodiment of the present invention provides a kind of mapping method based on multi-line lidar, comprises steps:
[0049] S1. Project the three-dimensional point cloud data collected by the multi-line laser radar to the horizontal plane where the laser radar is located to generate two-dimensional laser radar point cloud data;
[0050] S2. Perform frame-to-frame matching on the generated two-dimensional lidar point cloud data to realize data association;
[0051] S3. Calculate the multi-line laser radar pose (position and orientation) according to the position of the matched point cloud on the map, and use graph optimization to manage the multi-line las...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More