

Dense height map construction method suitable for leg-foot robot planning
A map construction and height map technology, which is applied to vehicle position/route/altitude control, instruments, two-dimensional position/channel control, etc. high precision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] Below, the technical solution of the present invention will be further described in conjunction with the accompanying drawings and specific embodiments:
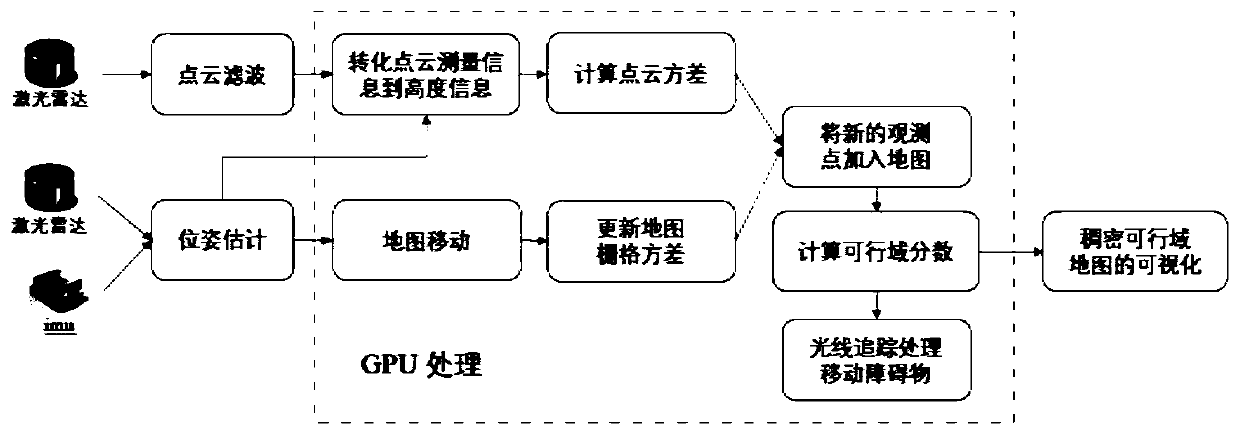
[0041] Such as figure 1 , the present invention provides a dense map construction method, comprising the following steps:
[0042] Step 1: Use lidar to obtain point cloud information of the surrounding environment at a frequency of 10-20 Hz, and the point cloud information is mapped to a local height map. In the local height map, the height measurement value is a Gaussian probability distribution, which is approximately Among them, p is the measured height value, δ p 2 is the variance. In the lidar coordinate system S, obtain a single measurement value from the lidar to the terrain Convert it to the corresponding height value p, specifically:
[0043]
[0044] in, Represents the inverse of the rotation matrix of the lidar coordinate system S transformed to the global map coordinate system M; is the dista...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More