

Target estimation method based on multi-source information fusion
A multi-source information fusion and target technology, applied in the field of guidance and control, can solve the problems of large delay and noise of target position information, weakened application effect, and insufficient adjustment of aircraft, and achieve stable error fluctuations, low error fluctuations, and small error fluctuations Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0067] By observing the target with four aircraft, the line-of-sight angle information between the aircraft and the target, the position information of the aircraft relative to the target, and the speed information of the aircraft relative to the target are obtained in real time. Taking the 30th second as an example, the information obtained from the observation is as follows:
[0068] aircraft 1 2 3 4 position (m) (-10935,2866) (-10639,4173) (-11072,-1996) (-10769,2322) speed(m / s) (182.7,-121.8) (222.6,-11) (223,-8.7) (188.1,141.4) Sight Angle (rad) -0.2181 -0.3394 0.2058 0.2324
[0069] thus obtaining:
[0070] Aircraft position velocity variable
[0071] Sight angle variable is the measured line-of-sight angle between the aircraft and the target,
[0072]
[0073]
[0074] Obtained by formula (1)
[0075]
[0076] where the measurement noise The line angle measurement error is σ q =0.2°(1σ);
[0077]...
experiment example
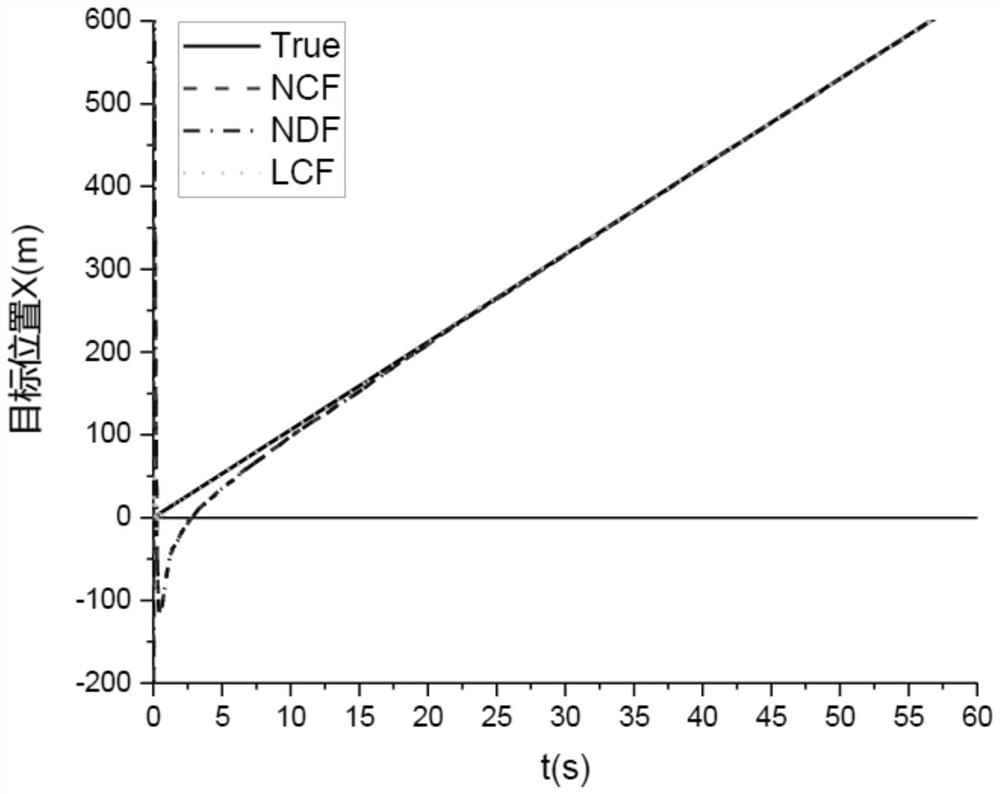
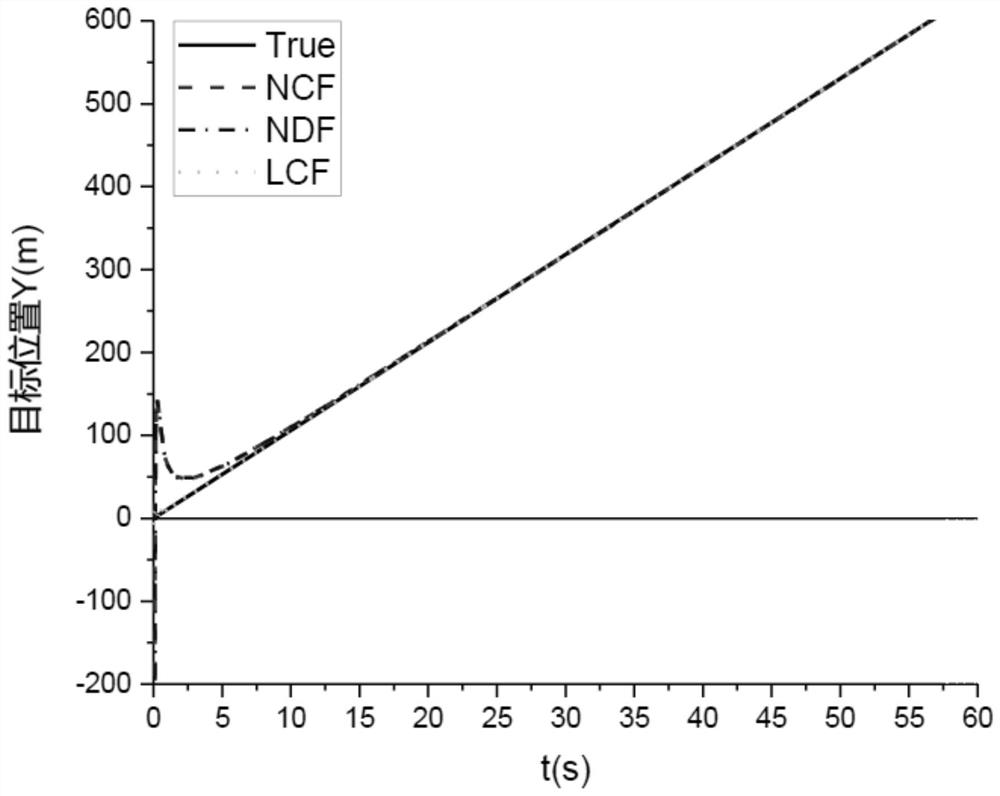
[0105] The simulation experiment is carried out in a two-dimensional plane, in which four aircraft are selected to observe the moving target at the same time, and estimate the target state. Set the target to be at the origin of the relative coordinate system, that is, the position (0,0)m, and the target speed is ν T =15m / s, target initial velocity direction angle θ T = 45°.
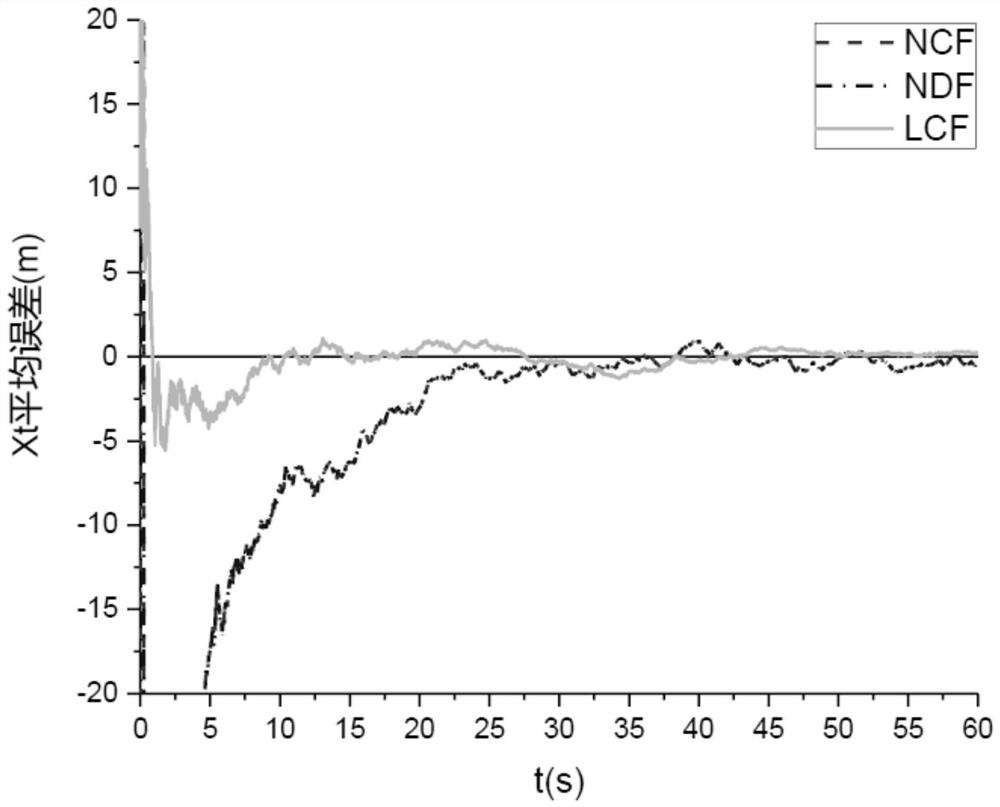
[0106] The existing nonlinear centralized filtering method (NCF), the existing nonlinear distributed filtering method (NDF) and the target estimation method based on multi-source information fusion (LCF) provided by this application are respectively used to estimate the target state. The number M of Monte Carlo simulations is 10.
[0107]Among them, the average estimation error E(k) and the mean square error D(k) are defined as the evaluation indicators of the algorithm performance, which are used to describe the difference between the estimated value of the state and the real value.
[0108]
[010...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More