

Quad-rotor unmanned aerial vehicle suspension air transportation system trajectory planning method based on reinforcement learning
A quad-rotor UAV and reinforcement learning technology, applied in control/regulation systems, non-electric variable control, instruments, etc., can solve the problems of untested effects, high model accuracy requirements, and poor robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0094] The technical solutions of the present invention will be further described below with reference to the accompanying drawings and embodiments, which are not intended to limit the protection scope of the present invention.
[0095] The present invention firstly constructs the performance index evaluation function, brings the index function into the Hamilton-Jacobi-Bellman equation according to the principle of optimality, and then updates the output layer weights of the execution network and the evaluation network in real time. , obtain the approximate solution of the HJB equation, and obtain the optimal control quantity.
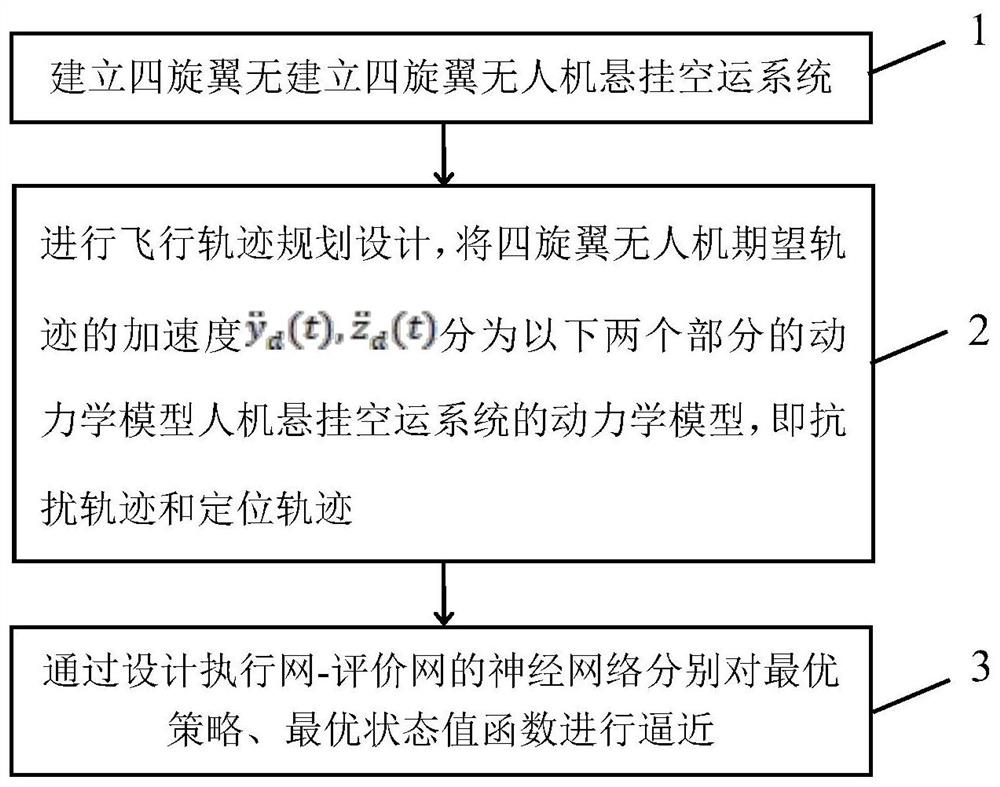
[0096] like figure 2 As shown, the reinforcement learning-based trajectory planning method of the quadrotor UAV suspended air transport system of the present invention specifically includes the following steps:
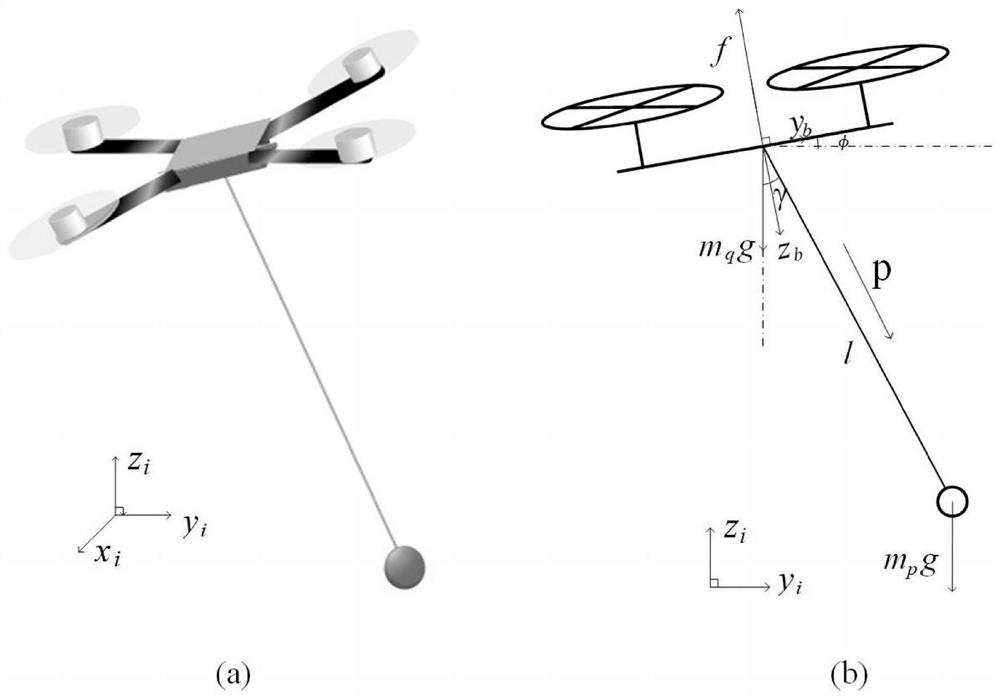
[0097] Step 1, establish the dynamic model of the suspended air transport system of the quadrotor UAV:
[0098] like figure 1 As shown, i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More