Handheld pan-tilt attitude estimation method based on extended Kalman filtering
A technology that extends Kalman and handheld pan/tilt, applied in the field of automatic control, can solve problems such as gimbal deadlock, small amount of calculation, and inability to adapt to high-frequency disturbance input well
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] The present invention is further described below in conjunction with accompanying drawing:
[0084] A hand-held gimbal attitude estimation method based on extended Kalman filter
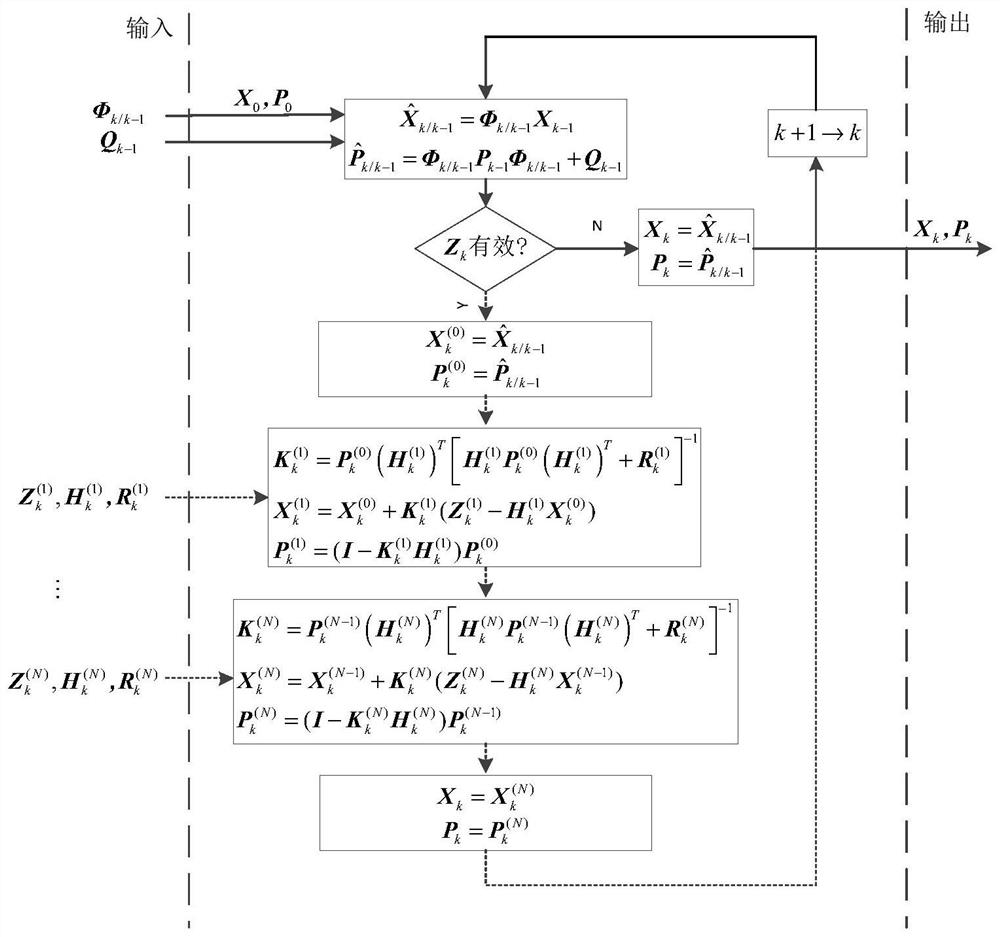
[0085] The first step is to select the state vector (X k ), construct the prediction equation of the state vector, and calculate the Jacobian matrix of the state prediction according to the prediction equation of the state vector, this matrix is the state transition matrix (Φ k / k-1 ), so far, the prediction process of the state vector is completed.
[0086] The second step is to select the measurement according to the sensor in the attitude estimation system and combine the state vector to construct the measurement prediction equation, and then calculate the Jacobian matrix of the measurement prediction value according to the measurement prediction equation, which is the measurement matrix (H k ), so far the model of the attitude estimation system is established.
[0087] In the third ste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More