

Device for grasping electromagnetic transducer to assist nondestructive testing and trajectory planning method of device
A technology of non-destructive testing and trajectory planning, applied in the direction of measuring devices, instruments, scientific instruments, etc., can solve problems such as errors, time-consuming and labor-intensive, data errors, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
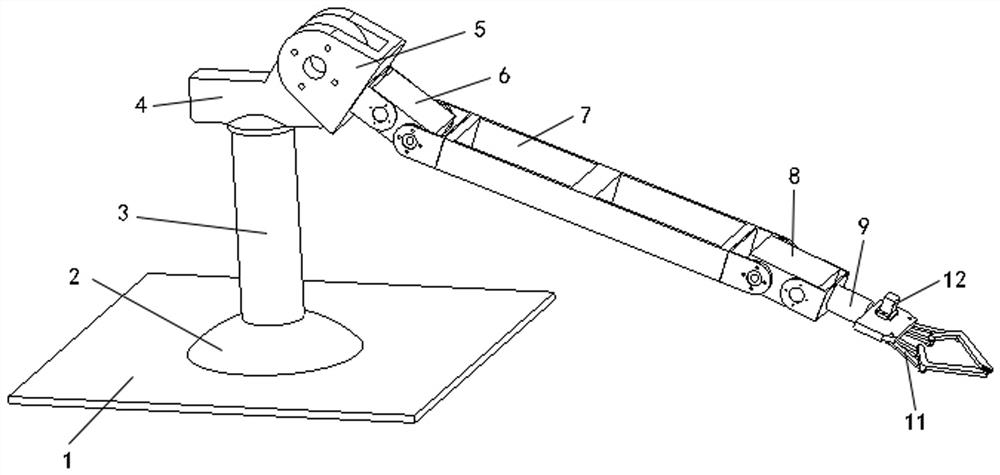
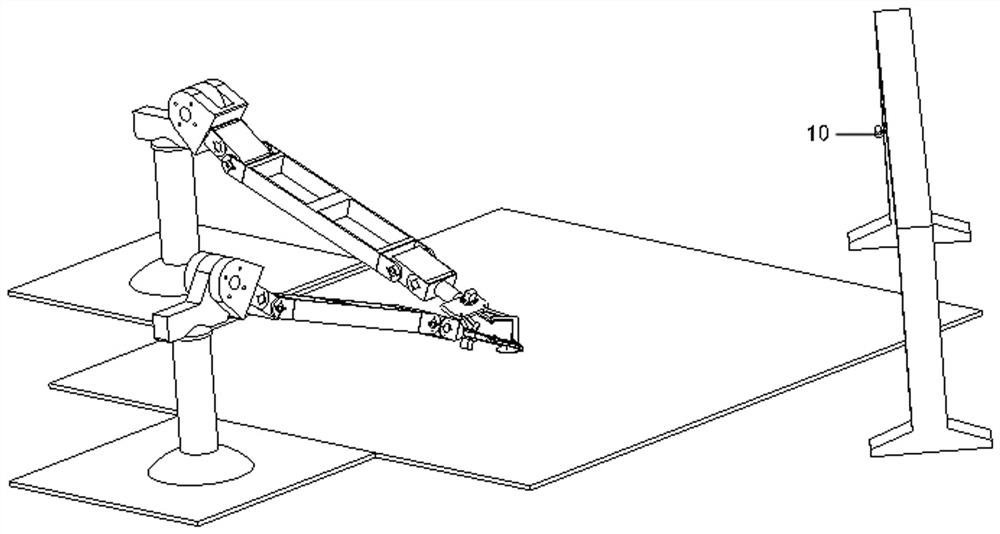
[0061] like figure 1 As shown, a device for grasping electromagnetic transducers to assist non-destructive testing includes two mechanical arms and a binocular camera 10. The two mechanical arms are respectively arranged on the mechanical arm support base 1 around the testing platform, and placed on the testing platform For the metal plate to be detected, the two mechanical arms cooperate with the clamping electromagnetic transducer to move and detect on the metal plate to be detected; the binocular camera 10 is set on the support frame around the detection table, and is used to collect the metal plate to be detected, the electromagnetic transducer Images of energy devices and robotic arms;
[0062] like figure 2 As shown, the mechanical arm includes a first rotating shaft 2, a support column 3, a first mechanical arm 4, a fixing device 5, a first steering gear 6, a second mechanical arm 7, a second steering gear 8, and a second rotating shaft 9. Mechanical claw 11, geared ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More