

Multi-gyroscope fault diagnosis and reconstruction method based on non-homogeneous equation solution
A homogeneous equation and fault diagnosis technology, applied in measurement devices, instruments, etc., can solve the problems of large control system influence, gyro failure, weak algorithm generality, etc., and achieve the effect of wide application range and fast self-reconfiguration design.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
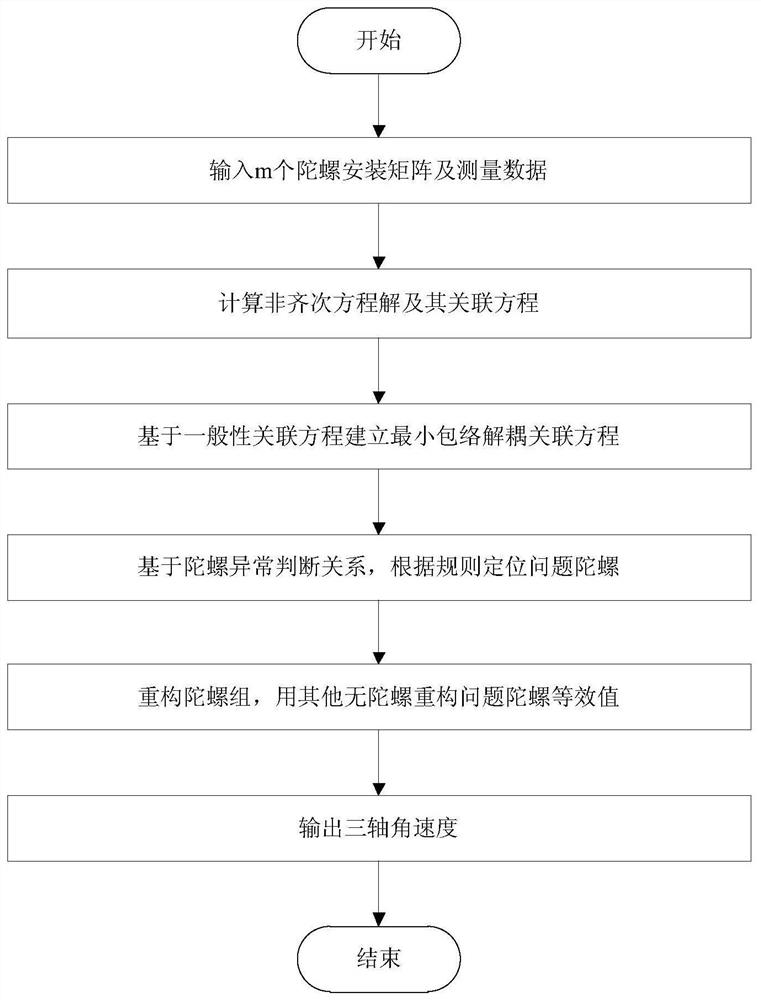
[0124] The invention provides a multi-gyroscope fault diagnosis and reconstruction method based on the solution of non-homogeneous equations. The satellite is equipped with 7 gyroscopes, which mainly measure the angular velocity of the output star. When a gyroscope is abnormal, the abnormal gyroscope is located by this algorithm. And give the output of the reconstructed stellar angular velocity.
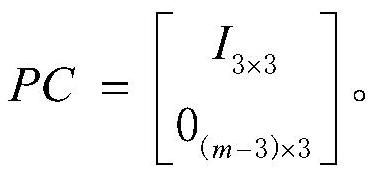
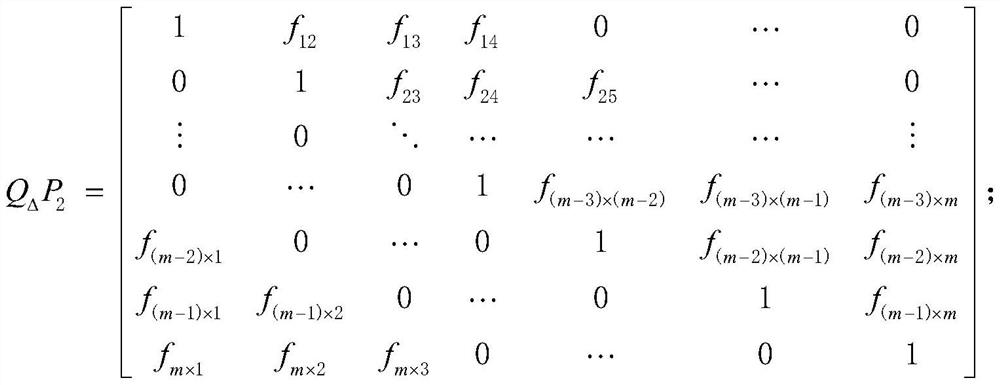
[0125] (1) Establish non-homogeneous equations and general correlation equations
[0126] The known gyro i installation matrix is The measured angular velocity is w g1 , the three-axis angular velocity of the control system is w x 、w y 、w z ,make
[0127]
[0128] C 1
0.577350269189626 0.000000000000000 0.816496580927726 C 2
0.577350269189626 -0.524833885571765 0.625472668645329 C 3
0.577350269189626 -0.707106781186548 -0.408248290463863 C 4
0.577350269189626 -0.279258277633819 -0.767255811994708 C 5
0.577350269189626 0.7...
Embodiment 2
[0203] Simulation conditions: Gyro 1 and 9 are abnormal. Threshold δ i =0.1, i=1,...,9
[0204] Calculate through the method that the present invention proposes, obtain the column number of X and calculate the residual value, see the following table:
[0205] column number residual 1 -1 6 0.844029628745985 7 0.347296355333861 8 -2.87938524157181 9 1.13715804260326
[0206] That is, if the equations 1, 6, 7, 8, and 9 exceed the given threshold of 0.1, it can be seen from Table 2 that gyro 1 and gyro 9 are abnormal. Then the three-axis angular velocity of the star is
[0207]
[0208]
[0209]
[0210] The method of the present invention can simultaneously determine the number of abnormal gyroscopes in the gyroscope group through the decoupling method, and replace the abnormal gyroscopes with normal gyroscopes to give the correct result of the three-axis angular velocity of the star.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More