

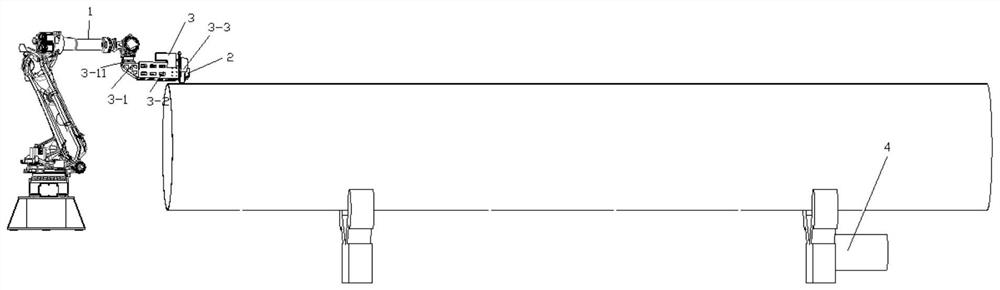
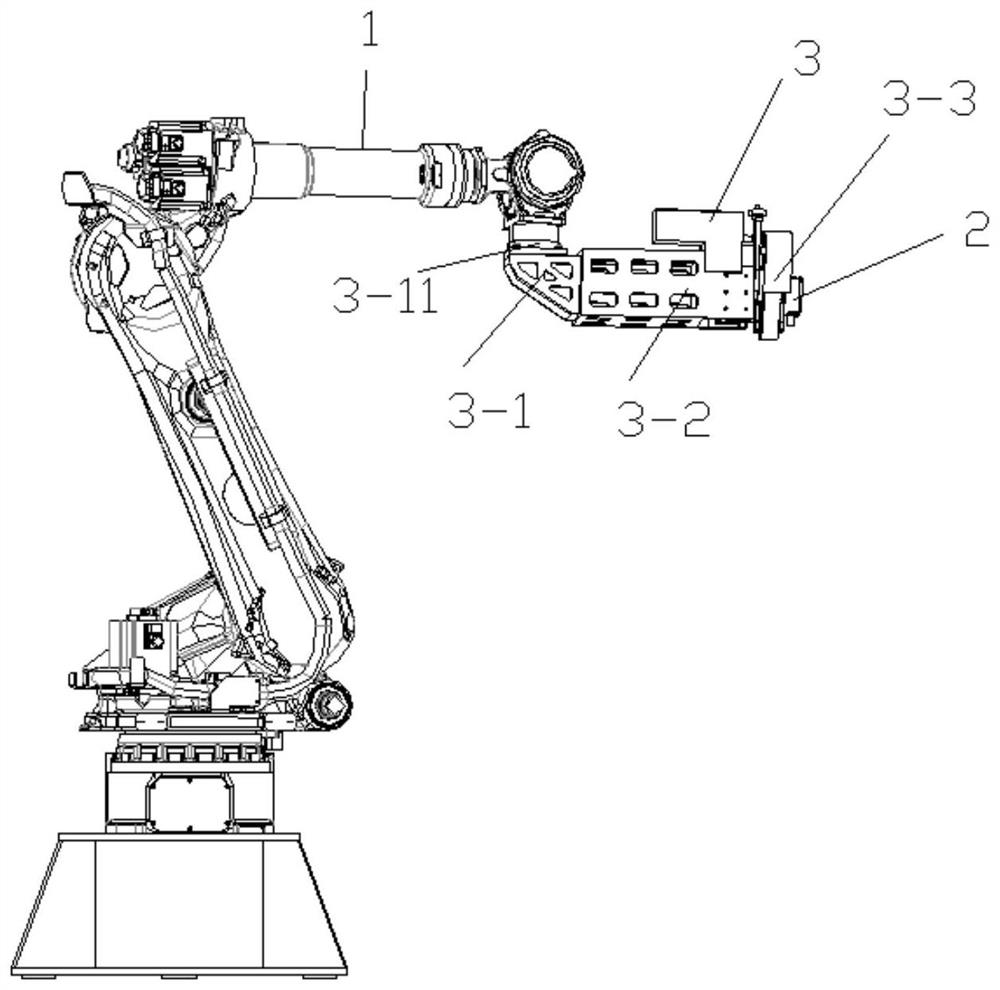
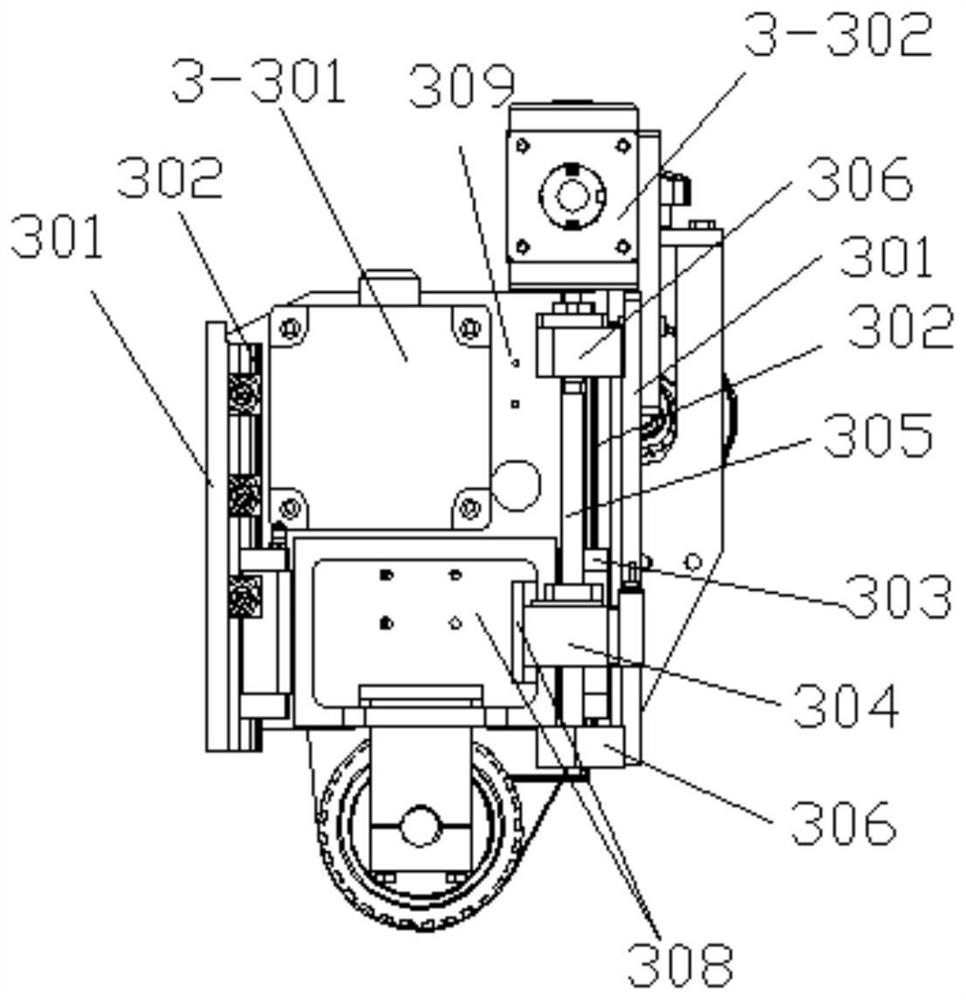
Straight welded steel pipe end weld automatic grinding robot
A technology of straight welding seam and robot, which is used in grinding frames, parts of grinding machine tools, grinding machines, etc., can solve the problem that it cannot meet the needs of high-precision and high-reliability automatic grinding without damaging the base metal, and the natural frequency of the pneumatic system is stable. problems such as poor performance, unsatisfactory grinding linearity output, etc., to avoid damage to the base metal by the grinding head, simple and convenient replacement of the abrasive belt, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] Attached below Figure 1-26 Specific embodiments of the invention are described. It should be understood that the embodiments described below are only illustrative rather than specific limitations on the invention.
[0052] The following examples facilitate a better understanding of the present invention, but do not limit the present invention. The experimental methods in the following examples are conventional methods unless otherwise specified. The components and materials used in the following examples are commercially available unless otherwise specified. The implementation of the control circuit in the following embodiments is a conventional control method unless otherwise specified.
[0053] In the present invention, unless stated otherwise, it should be understood that the terms "center", "upper", "lower", "front", "rear", "left", "right", "vertical The orientations or positional relationships indicated by "straight", "horizontal", "top", "bottom", "inner" an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More