Multi-sensor target fusion and tracking method and system
A multi-sensor and fusion method technology, applied in radio wave measurement systems, instruments, image data processing, etc., can solve the problems of direct method and low efficiency, and achieve the effects of reducing interference, improving reliability and accuracy, and improving tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
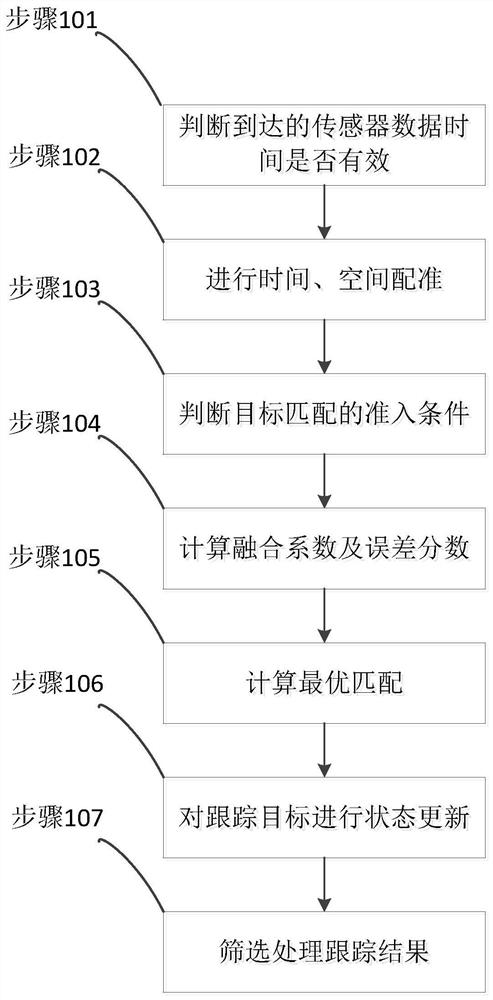
[0094] Embodiment 2 is based on Embodiment 1 and further improves sensor target fusion. Optionally, on the basis of calculating the optimal match, a step of updating the status of the tracking target and a step of screening and processing the tracking result are added.
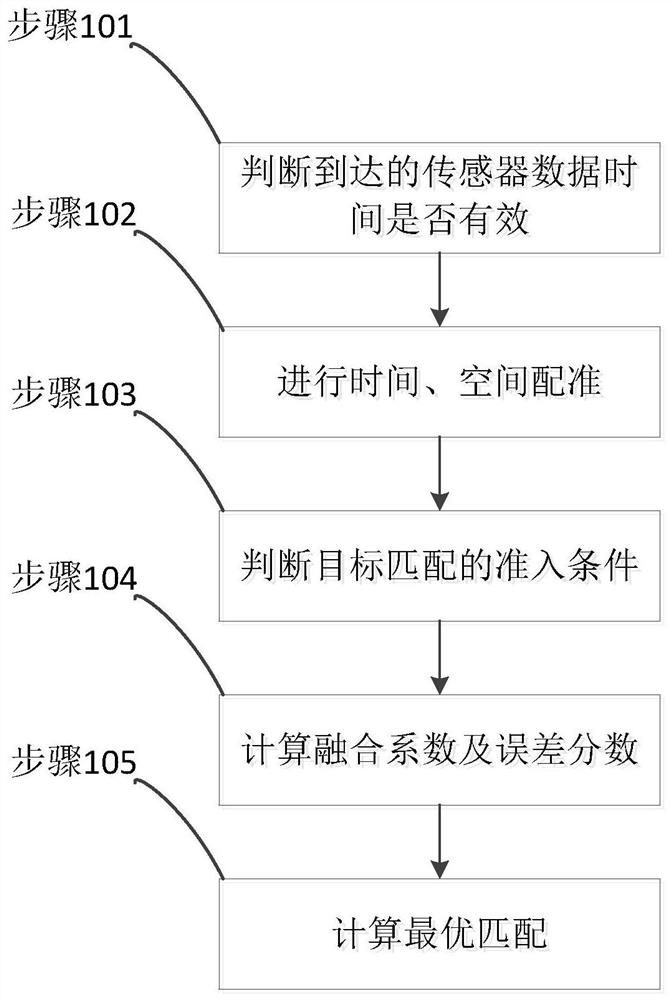
[0095] Specific as figure 2 As shown, it includes step 101-step 105 in embodiment 1. In addition, this embodiment 2 may also include step 106: updating the status of the tracking target.
[0096] For the best match obtained in step 105 , process the matched radar target points and visual target points: select superior results of different sensors to update the state of the tracked target.
[0097] The present invention comprehensively considers the characteristics, advantages and disadvantages of the two sensors, and performs different processing on the two kinds of data: because the millimeter-wave radar has higher measurement accuracy for longitudinal distance measurement, and the camera sensor has higher...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com