

Multi-unmanned aerial vehicle formation robust control method based on virtual structure method
A virtual structure, multi-UAV technology, applied in the direction of non-electric variable control, control/regulation system, three-dimensional position/course control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
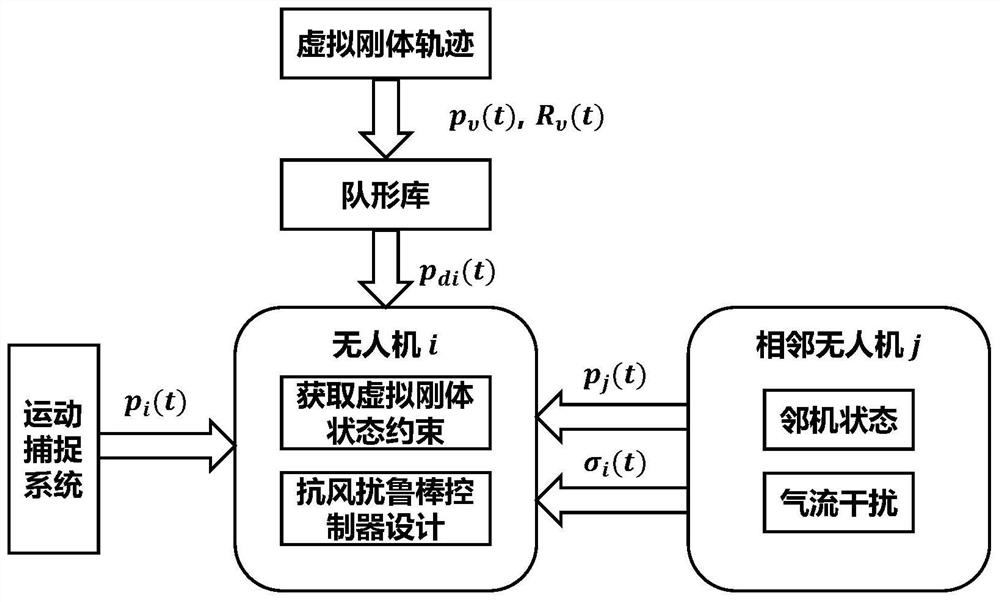
[0048] In order to overcome the deficiencies of the existing technology, the present invention aims to propose a nonlinear controller based on the virtual structure method and the second-order sliding mode algorithm to realize the distributed formation of multi-UAVs under the constraints of inter-machine airflow interference and information acquisition. control. The technical solution adopted by the present invention is to use the virtual structure method to analyze the formation system based on the multi-UAV formation control method based on the virtual structure method and the second-order sliding mode algorithm, aiming at the constraints that some UAVs cannot directly obtain the state of the virtual rigid body , and considering the airflow interference between UAVs, a robust control algorithm based on super-twisting is designed to realize multi-UAV distributed formation control. The steps are to establish a multi-UAV position loop dynamic model, and then simplify the system ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More