

Biped robot stable walking control method, device, equipment and readable medium
A biped robot and control method technology, applied in the direction of program control of manipulators, manipulators, motor vehicles, etc., can solve problems such as inability to recover from disturbances in time, achieve the effect of quickly predicting the state of the robot's center of mass, reducing complexity, and improving solution speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] In order to make the purpose, technical solution and advantages of the present application clearer, the technical solution of the present application will be clearly and completely described below in conjunction with specific embodiments of the present application and corresponding drawings. Apparently, the described embodiments are only some of the embodiments of the present application, rather than all the embodiments. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the scope of protection of this application.
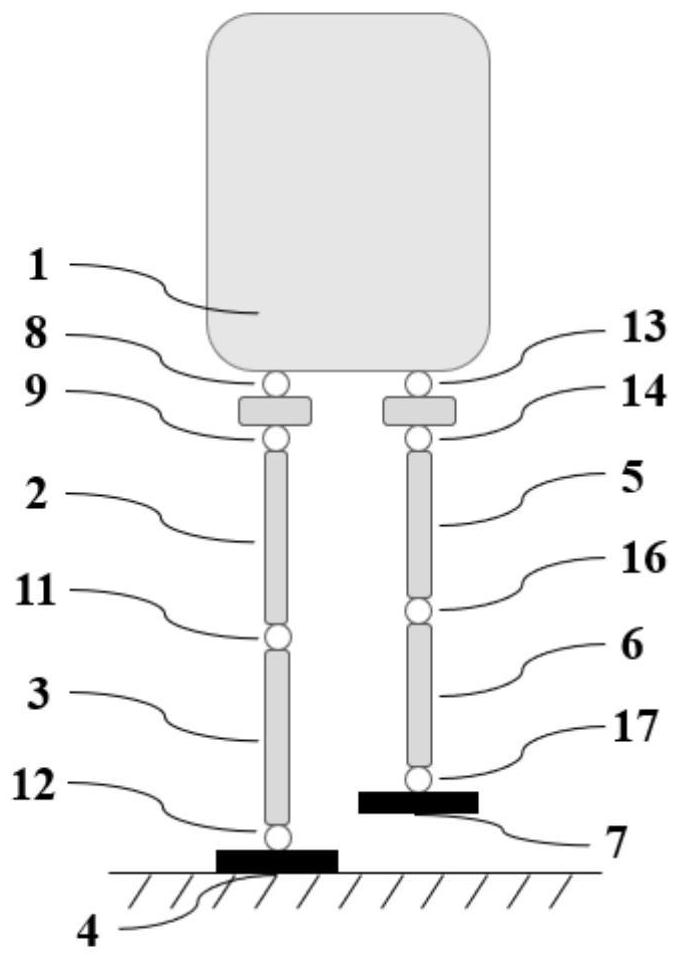
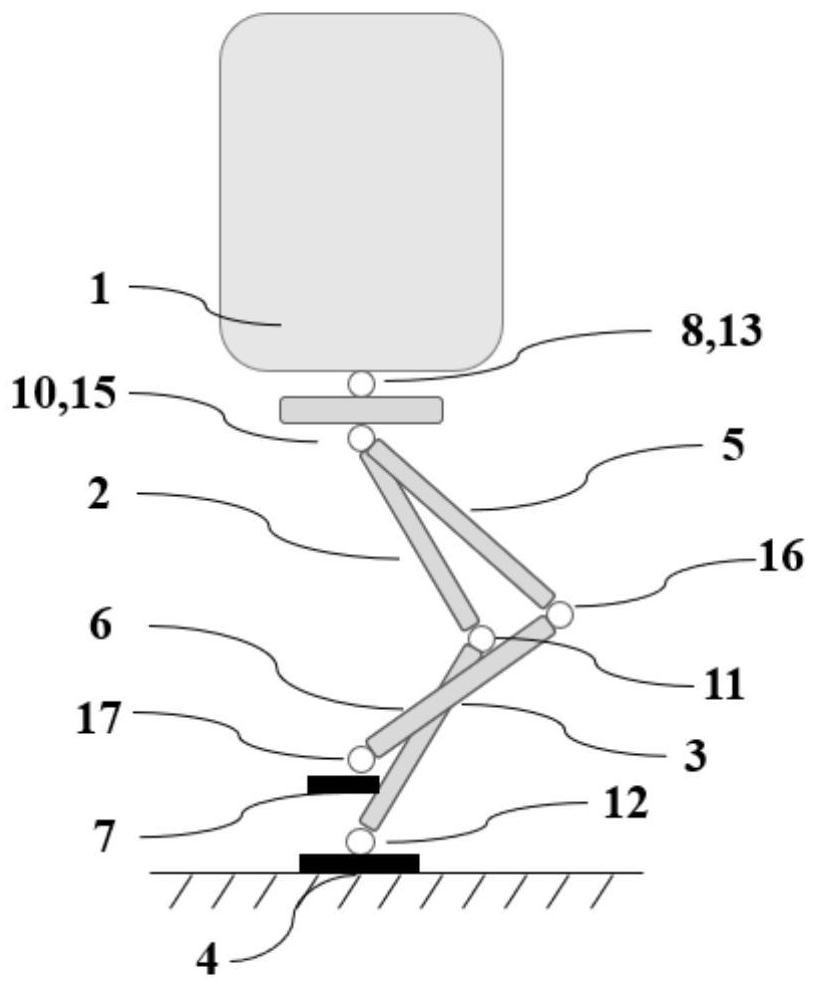
[0049] Here, the structure of the biped robot is described first. The structure of the biped robot is shown in Figure 1(a) and Figure 1(b), which mainly consists of the trunk 1 and lower limbs, which include the right thigh link 2, the right thigh Calf link 3, right foot 4, left thigh link 5, left calf link 6, left foot 7, right hip yaw joint 8, right...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More