Remote control device for legged robot, and operation interaction mode for legged robot
A remote control and robotic technology, applied in the field of robotics, can solve problems such as limited vision range, difficult interaction between robots and humans, vision fixation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
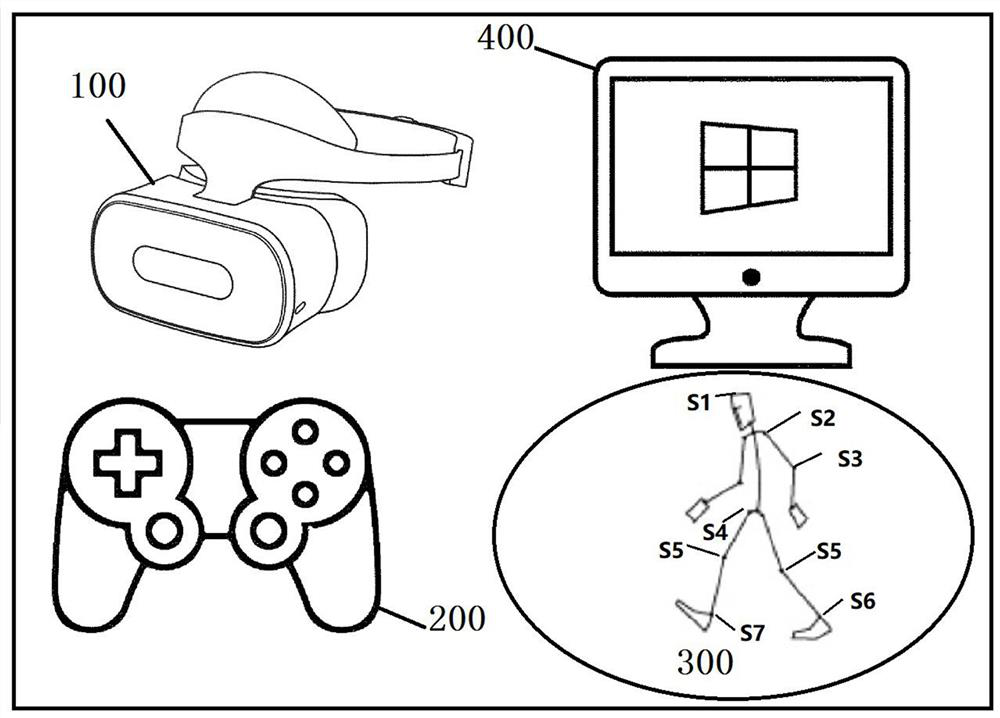
[0078] In this example, the master control terminal can also use the handle 200 to control the robot, and view the image of the camera device on the robot through the display screen 400 .
Embodiment 2
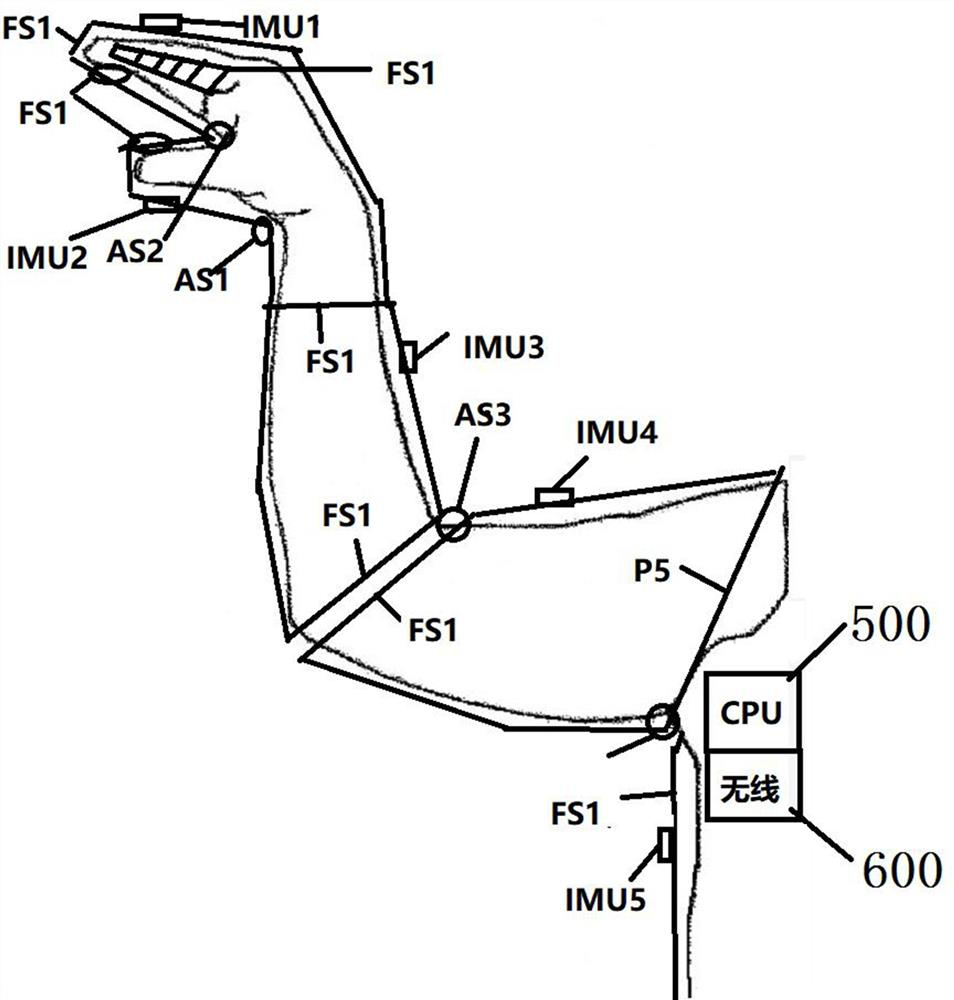
[0080] Such as Figure 5 As shown, the movement of the operator's hand and arm joints can be mapped to the control unit of the robot's manipulator joints, so that the manipulator joints form a corresponding synchronous movement.
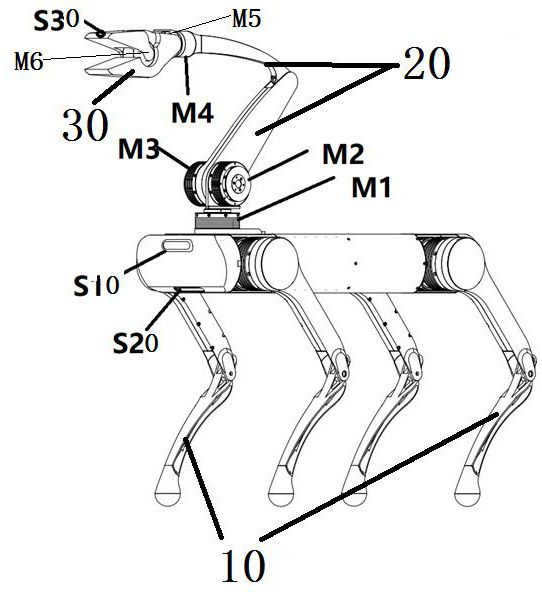
[0081] Specifically, the gripping action A6 of the hand's tiger's mouth is mapped to the gripping action A6 of the robot's mouth-shaped manipulator;
[0082] The pitch motion A5 of the hand relative to the forearm is mapped to the pitch motion A5 of the robot mouth-shaped manipulator;
[0083] The rotation action A4 of the hand at the wrist is mapped to the rotation action A4 of the robot mouth-shaped manipulator;
[0084] The opening and closing action A3 of the forearm relative to the rear arm is mapped to the opening and closing action A3 of the front section of the robot manipulator relative to the back section of the manipulator;
[0085] The rotation motion A2 of the operator's arm relative to the shoulder is mapped to the rotation motion A2 ...
Embodiment 3
[0088] When the manipulator approaches the object through the synchronous control of the remote VR helmet, it can accurately grasp the target object with the bite action of the mouth and jaw of the manipulator. When grasping the target object, the grip between the mechanical mouth and the object Strength and contact conditions are important for accurate and intuitive operation. For example, when grasping a tomato and grasping a potato, the allowable strength is quite different. In addition, after the object is grasped, in addition to the pressure information, the contact information between the mechanical mouth and the object should also have contact information such as friction and relative force vector.
[0089] In this example, the sensor array inside the robotic mouth (mouth-shaped manipulator) forms a grid sensor array (tactile array).
[0090] The array contains tactile sensors such as pressure sliding detection. Because it is distributed in a grid array, the contact si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More