

Method for optimizing working posture of industrial robot
A technology of industrial robots and optimization methods, which is applied in the direction of manipulators, manufacturing tools, program-controlled manipulators, etc., and can solve the problems of huge workload, low efficiency, and large-scale hole-making operations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] now combined with Figure 1-5 The present invention is described in further detail.
[0075] It should be noted that terms such as "upper", "lower", "left", "right", "front", and "rear" quoted in the invention are only for clarity of description, not for Limiting the practicable scope of the present invention, and the change or adjustment of the relative relationship shall also be regarded as the practicable scope of the present invention without substantive changes in the technical content.
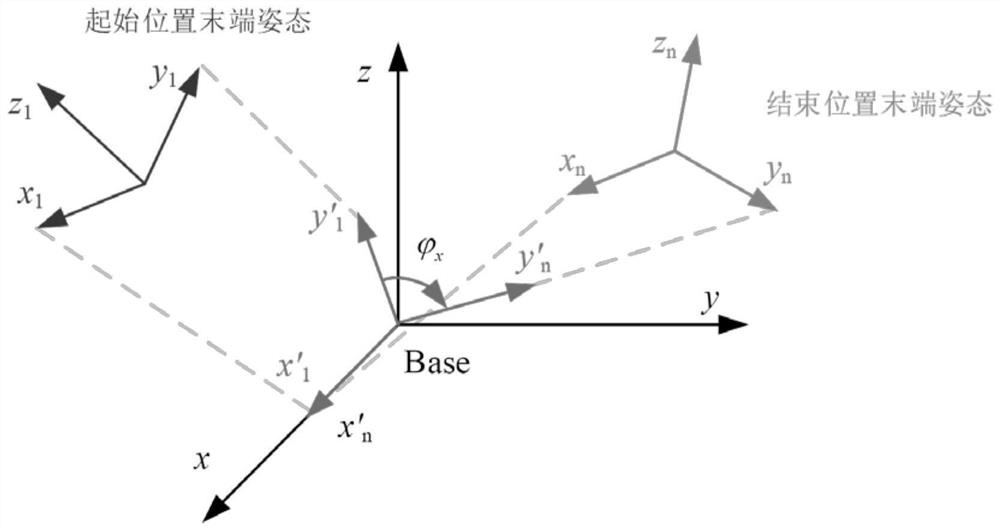
[0076] like image 3 As shown, in one of the embodiments of the present invention, a method for optimizing the working posture of an industrial robot comprises the following steps:
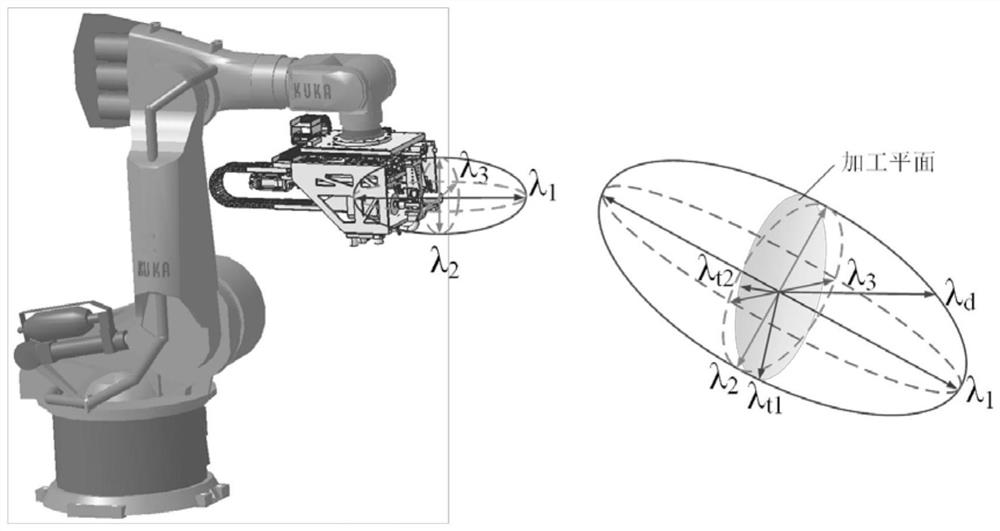
[0077] Step 1: Carry out the robot joint stiffness identification test in the given effective working space of the robot, and use the conversion formula K=J -T K θ J -1 Establish the stiffness model of the robot's Cartesian space, where K represents the stiffness of the Cartesian space, J represe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More