Route planning method, device and system based on dangerous goods transportation
A technology for dangerous goods transportation and route planning, applied in measuring devices, instruments, surveying, mapping and navigation, etc., can solve problems such as life and property hazards, easy to burn, and unstable transportation of flammable materials
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
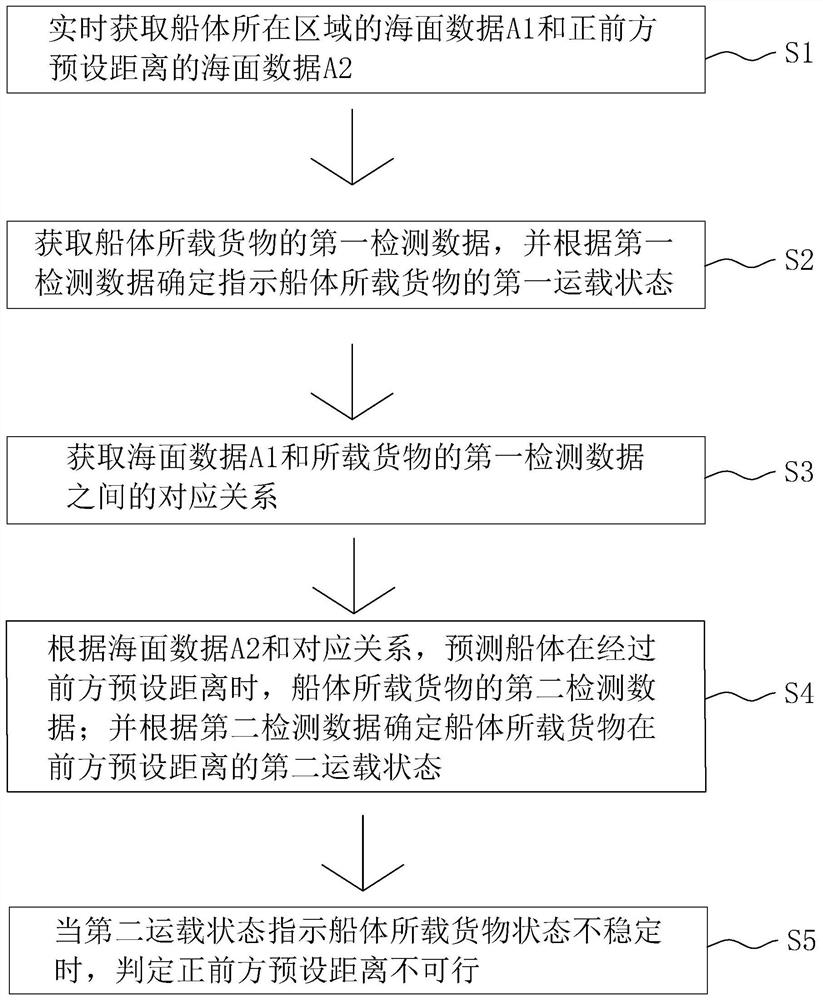
[0065] refer to figure 1 , which is a route planning method based on dangerous goods transportation disclosed in this application, comprising the following steps:
[0066] S1. Real-time acquisition of the sea surface data A1 of the area where the hull is located and the sea surface data A2 of the preset distance directly ahead;
[0067] S2. Obtain the first detection data of the goods carried on the hull, and determine and indicate the first carrying state of the goods carried on the hull according to the first detection data;
[0068] Specifically, the first detection data includes the offset angle of the goods in the carrying box, the temperature in the carrying box, and the humidity in the carrying box; determining the first carrying state of the cargo on the hull according to the first detection data includes:
[0069] If the deviation angle is greater than or equal to the deviation angle threshold, the first loading state is unstable;
[0070] If the temperature is grea...
Embodiment 2
[0088] refer to figure 1 , which is a route planning method based on dangerous goods transportation disclosed in this application, comprising the following steps:
[0089] S1. Real-time acquisition of sea surface data A1 of the area where the hull is located and sea surface data A2 of a preset distance directly ahead.
[0090] The sea surface data A1 includes the wave parameters acquired by the wave sensor in the current state of the hull, the obstacle distance detected by the sonar and the wind strength acquired by the wind speed sensor; the sea surface data A2 includes the wave parameters acquired by the wave sensor within the preset distance directly in front of the hull Wave parameters, obstacles detected by sonar, and wind strength obtained by wind speed sensors.
[0091] Specifically, the wave sensor can measure various eigenvalues of the wave height and the corresponding wave period. At the same time, it can also measure the three sets of parameters of the hull along...
Embodiment 3
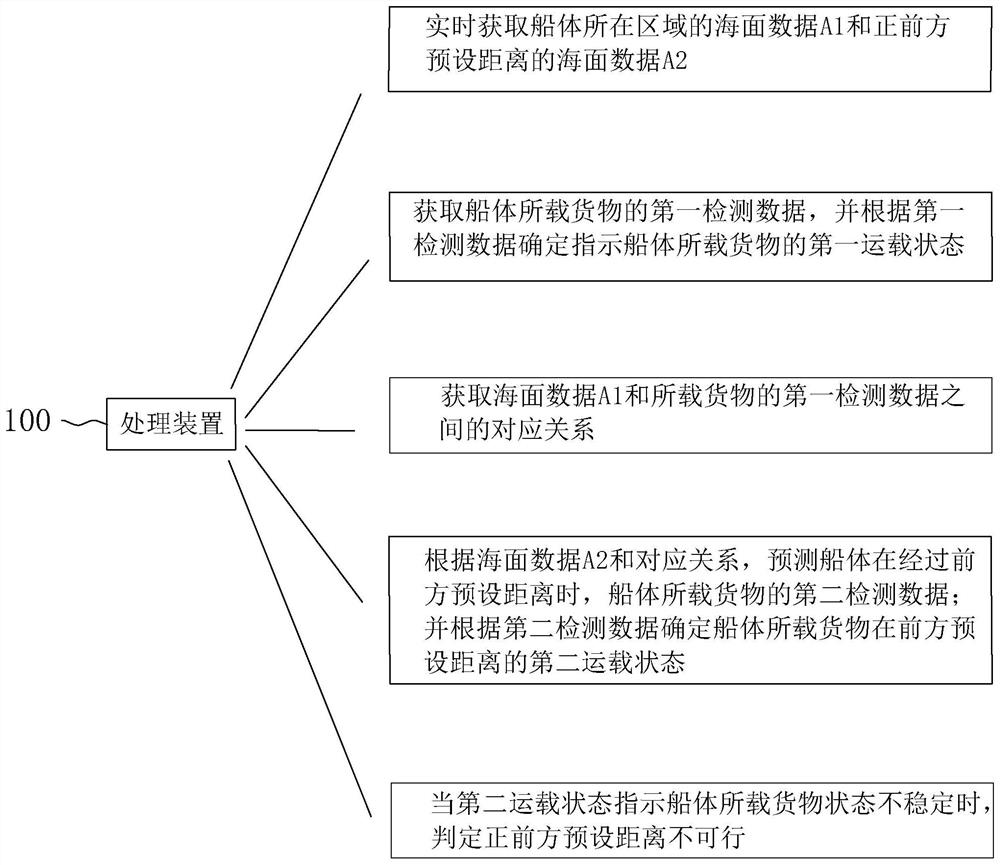
[0117] refer to image 3 , is a route planning system based on dangerous goods transportation disclosed in this application. The system includes a plurality of wave sensors respectively arranged around the hull for measuring sea wave parameters, a plurality of sonars for measuring obstacle distances, a plurality of The wind speed sensor for measuring wind strength, the system also includes a processing device 100, the processing device 100 is used for:
[0118] Obtain the current sea surface data A1 sent by the wave sensor, sonar and wind speed sensor in real time and obtain the sea surface data A2 directly ahead by calculating the data from the wave sensor, sonar and wind speed sensor;
[0119] Obtaining the first detection data of the goods carried on the hull, and determining the first carrying state indicating the goods carried on the hull according to the first detection data;
[0120] Calculate the corresponding relationship between the sea surface data A1 and the first...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



