

Semi-physical simulation system and method for rotor unmanned aerial vehicle cooperative control system
A semi-physical simulation and unmanned rotor technology, which is applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as system influence, complex structure, and inaccurate data, so as to ensure accuracy, simple operation, and flexibility sex high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
experiment example
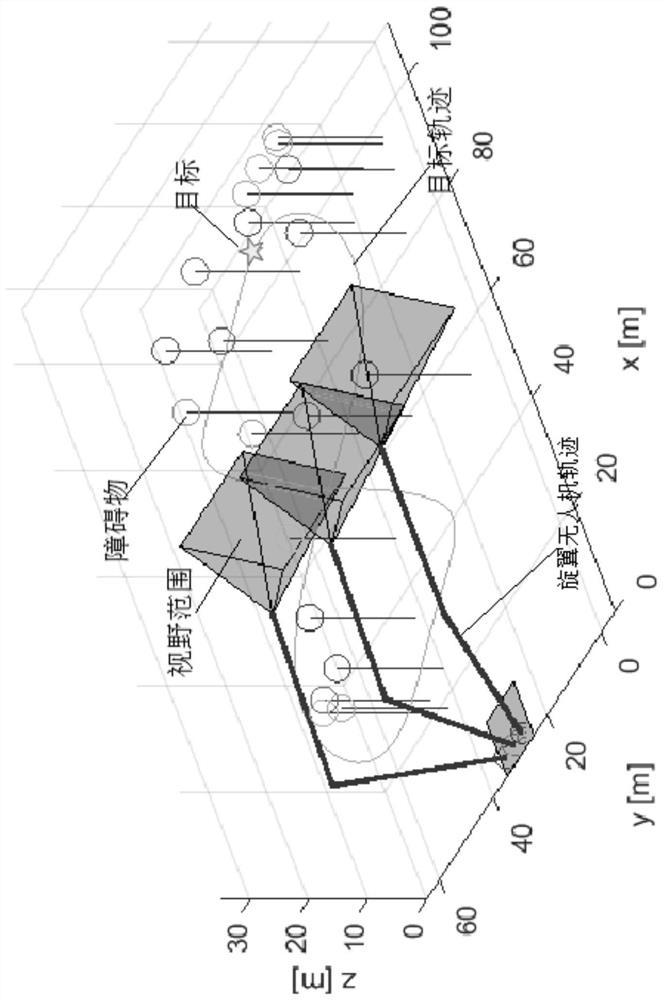
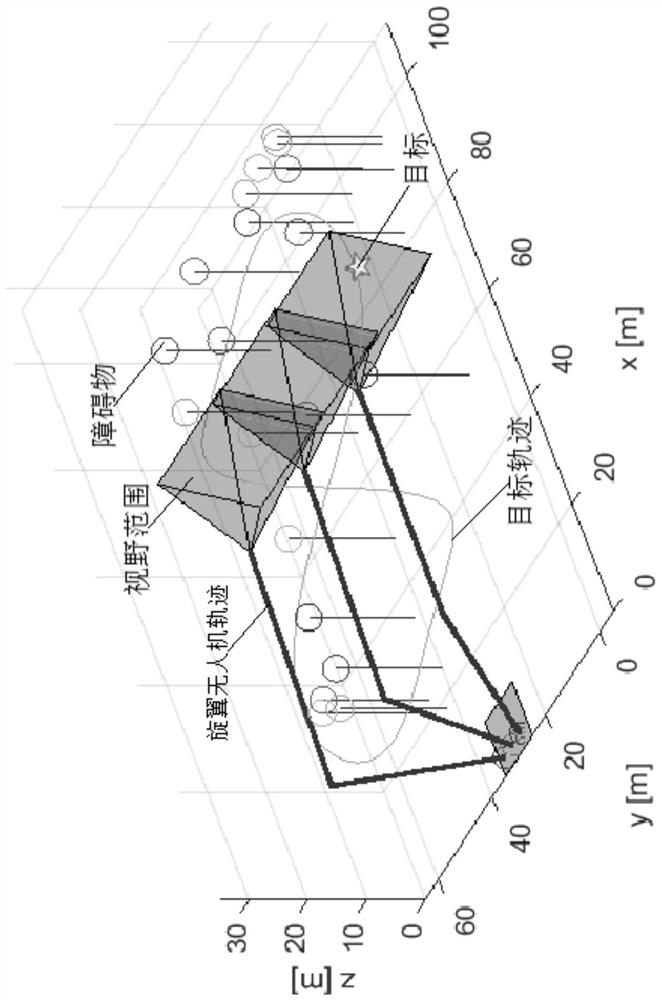
[0092] Install the rotor UAV cooperative control system on the control system installation platform, and ensure the signal connection between the rotor UAV cooperative control system and the control system installation platform. The task instruction on the rotor UAV cooperative control system is: use Three rotor UAVs conduct collaborative search and tracking of air targets. Specifically, control three rotor UAVs to search for targets at the same time. During the search process, three rotor UAVs need to avoid obstacles in the air and search for the target. Finally, one of the three UAVs will track it, that is, the rotor UAV will maintain a small distance from the target, and the other two rotor UAVs will hover and aim at the target direction. maintain a large distance between them.
[0093] Utilize the half-in-the-loop simulation system used in the coordinated control system of the rotor UAV to carry out the simulation experiment. The working process of the coordinated control ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More