

Buffering/walking integrated hexapod lander and gait control method thereof
A technology of gait control and lander, which is applied in the direction of aerospace vehicle landing devices, aircraft, and aerospace vehicles, and can solve problems such as the inability to install scientific loads, complex motion control strategies for quadruped configurations, and coordination changes.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0090] In order to make the object, technical solution and effect of the present invention clearer and clearer, the following examples are given to further describe the present invention in detail. It should be pointed out that the specific implementations described here are only used to explain the present invention, not to limit the present invention.
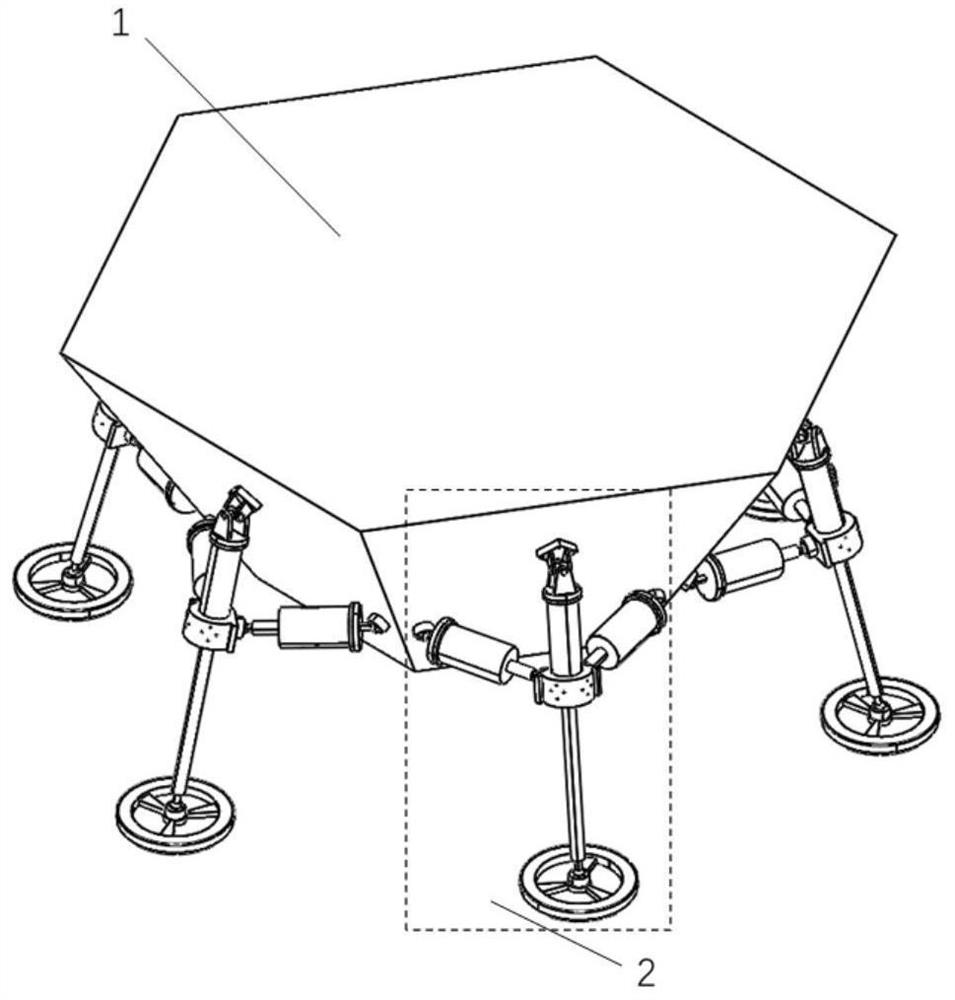
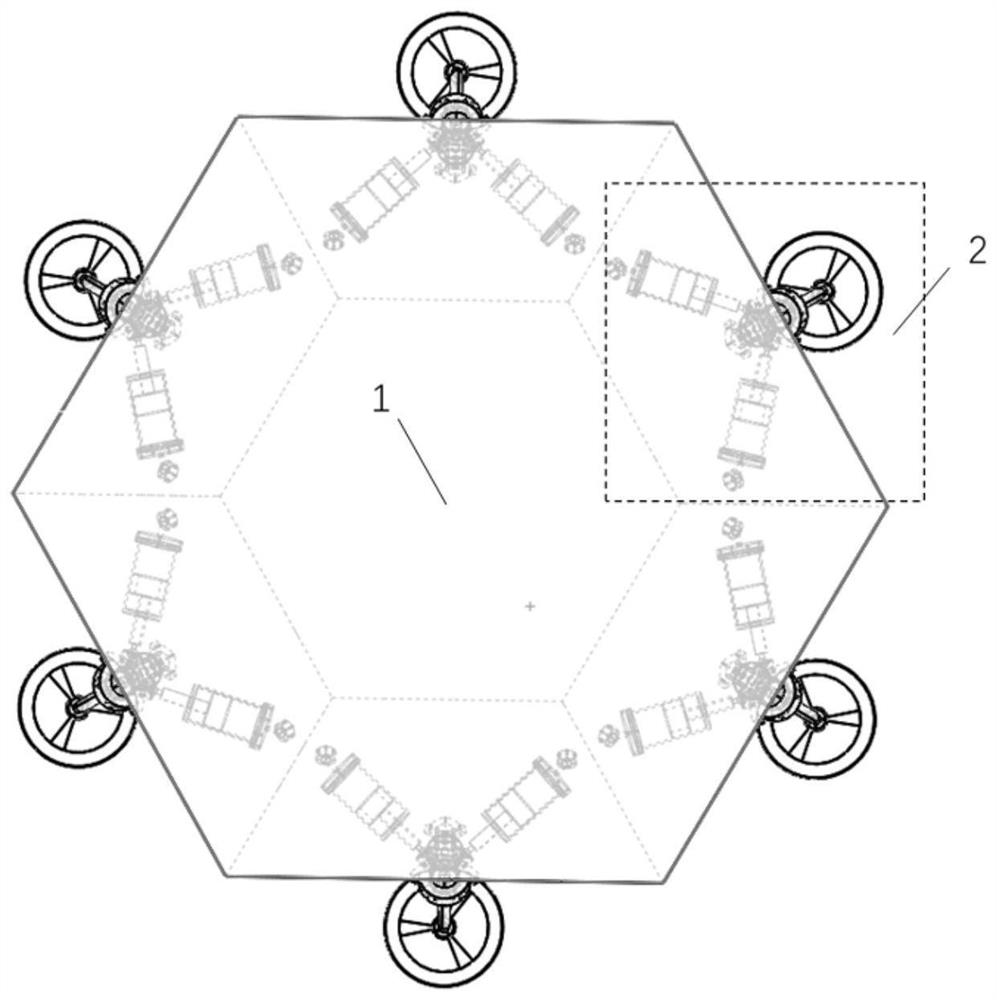
[0091] Such as Figure 1-8 As shown, it is a cushioning / walking integrated hexapod lander of the present invention. The present invention is divided into three parts: mechanical structure, control system and walking strategy. The mechanical structure adopts a hexapod symmetrical distribution structure, which makes it have good stability and omnidirectional movement ability.
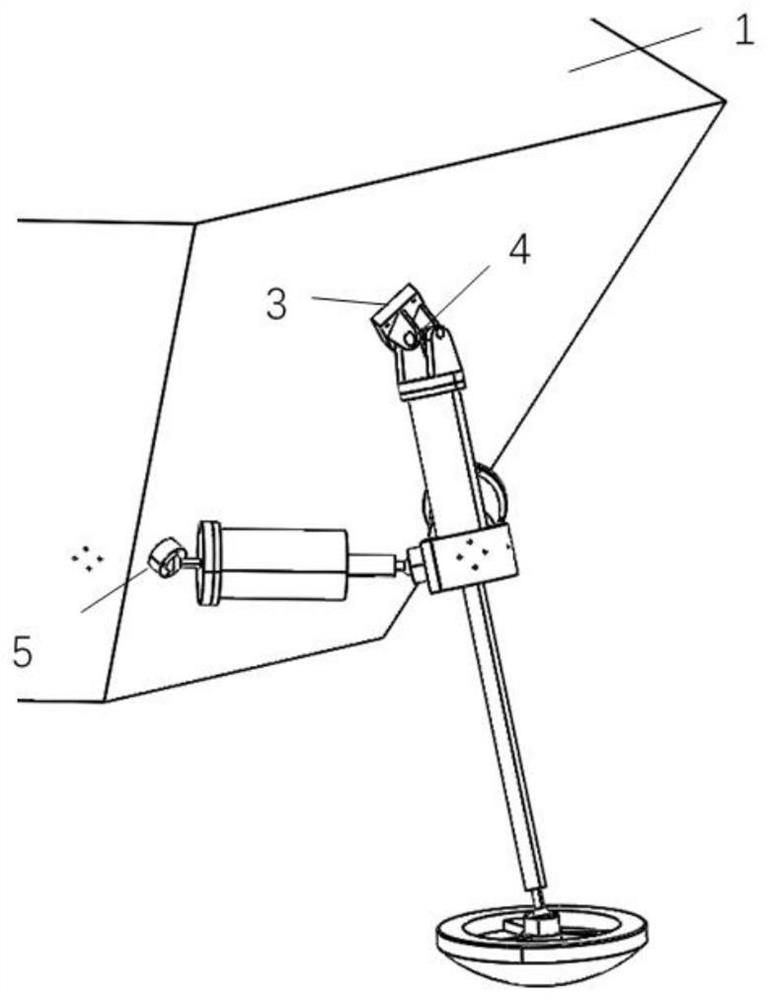
[0092] The hexapod lander of the present invention is composed of a hexagonal platform body 1 and six legs 2 symmetrically distributed in the center. The main body 1 is mainly used to connect the legs and feet 2, and carry control systems, scientific i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More