

Multi-unmanned ship formation fixed time control method based on finite time uncertainty observer
A limited time and fixed time technology, applied in the field of multi-unmanned ship formation cooperative control, can solve the problems of singularity and slow convergence speed, and achieve the effect of overcoming singularity and slow convergence speed, ensuring convergence speed and convergence accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
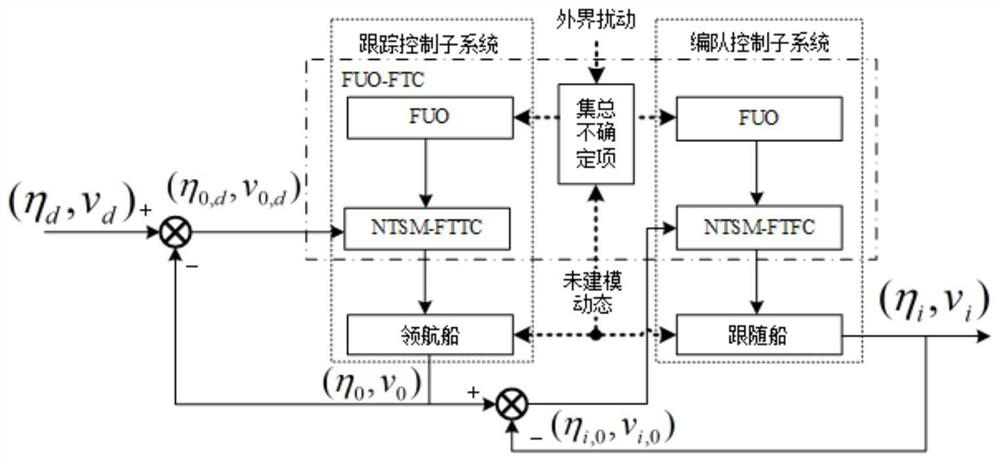
[0195] Such as figure 1As shown, it is a system design block diagram of the method of the present invention, and the whole control system is split into two subsystems, that is, the formation control subsystem and the tracking control subsystem respectively use the designed multi-unmanned ship based on the finite time uncertain observer. The formation fixed-time control method makes the trajectory tracking error quickly stabilize to 0, and uses the designed finite-time uncertain observer to observe and compensate unmodeled dynamics and external disturbances within a fixed time.
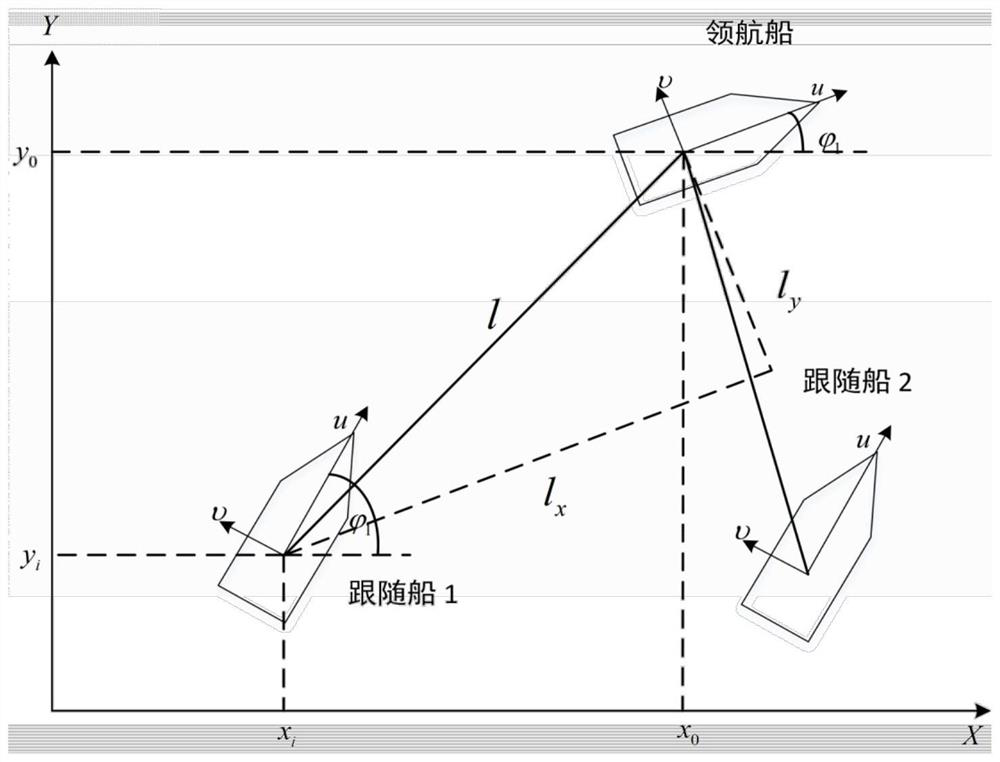
[0196] Such as figure 2 As shown, it is a schematic diagram of a simple unmanned ship formation composed of a pilot ship and two follower ships.
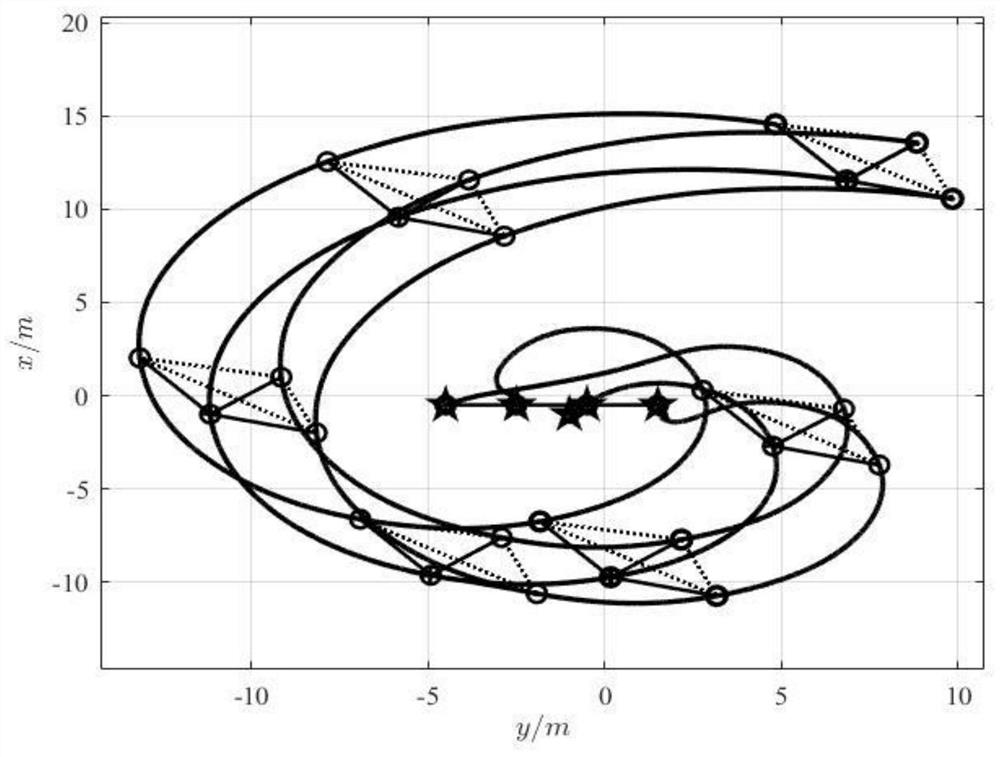
[0197] In order to verify the effectiveness of the method of the present invention, the classic Cybership II test ship model is selected for simulation tests, and the simulation uses a pilot-follow formation system consisting of 1 pilot ship and 3 follower...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More