

Local path planning algorithm and device
A local path planning and algorithm technology, applied in two-dimensional position/course control, vehicle position/route/height control, instruments, etc., can solve robot obstacle collision, robot falling into local minimum, no direct exclusion of speed, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
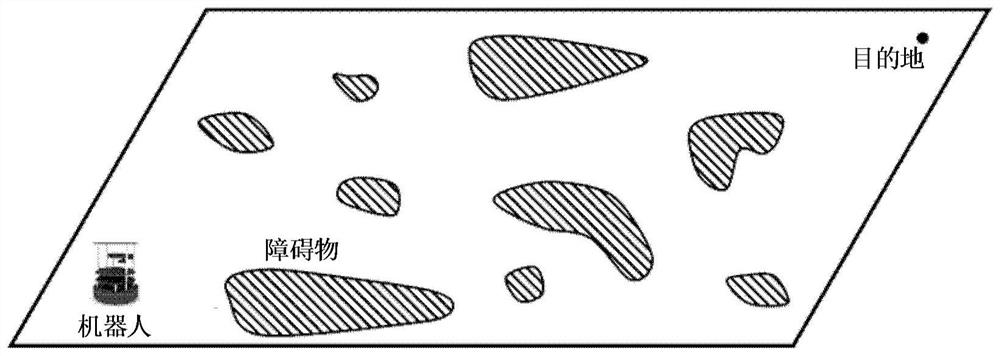
[0028] The mobile device will be equipped with a 360-degree scanning sensor, such as a laser radar, to perceive the local environment. In the embodiment of the present invention, the mobile device is used as a robot as an example to describe the solution in detail. When the robot moves on the ground, the surrounding environment There are often many scattered obstacles (such as figure 1shown), so the robot needs to effectively avoid these obstacles and reach the destination during the movement process.
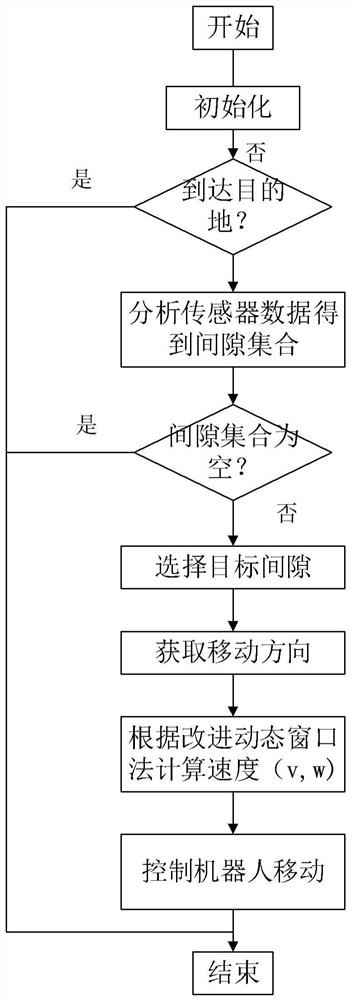
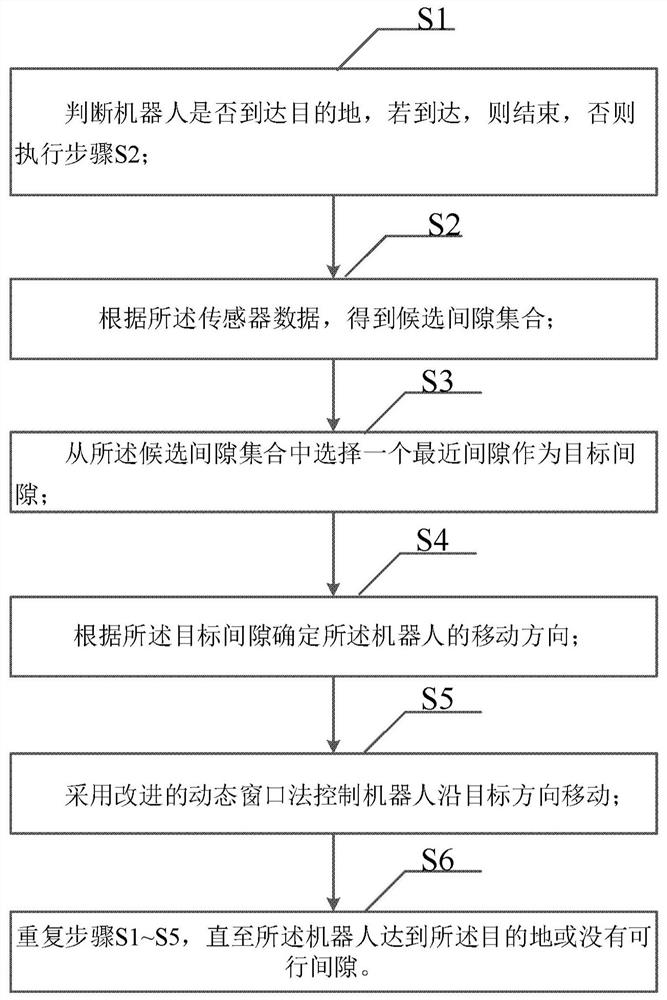
[0029] In the first aspect, the present invention provides a local path planning algorithm for path planning of mobile devices, the mobile devices are loaded with sensors, see figure 2 and image 3 , the algorithm inclu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More