

Swarm robot distributed competition cooperation method for multi-target tracking
A technology of swarm robots and robots, which is applied in the field of distributed competitive collaborative control, can solve problems such as lack of global communication, and achieve the effect of reducing communication load and computing load
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
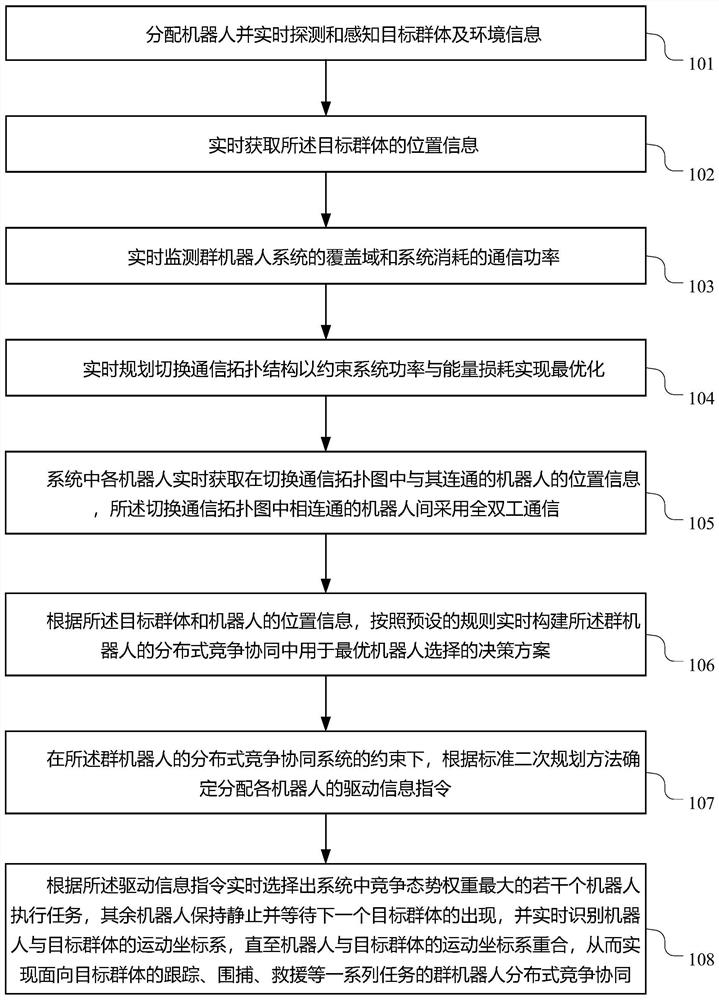
[0029] The present invention proposes a multi-target tracking-oriented distributed competition and collaboration method for group robots, aiming at realizing the distributed competition and collaboration of group robot systems in the presence of limited communication and fault interference, and making all robots in the system more efficient when performing tasks. and accuracy are optimized. In the process of distributed competitive cooperative control of swarm robots, we adopt the following rules to optimize the execution of tasks.
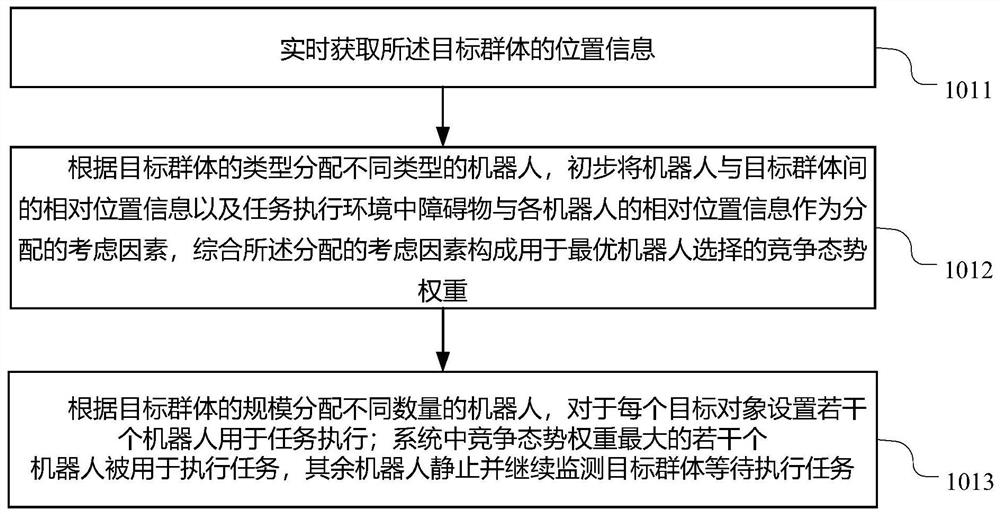
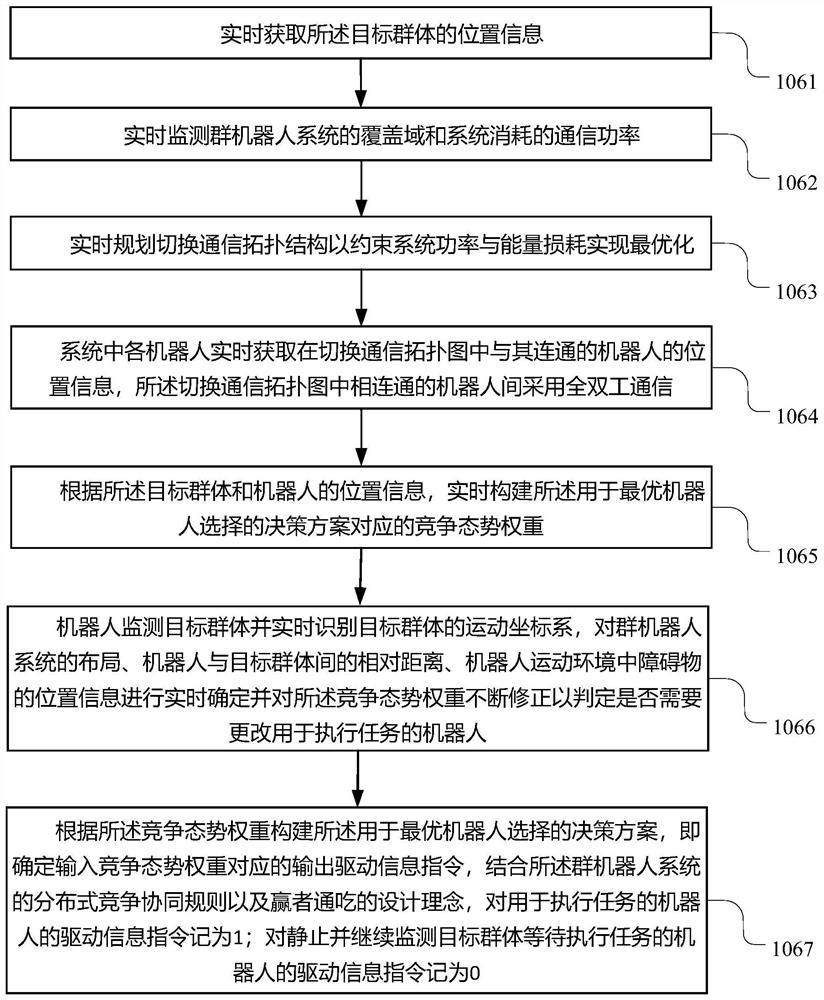
[0030] The decision-making process for the optimal robot in the distributed competition collaboration of the group robot system includes:
[0031] Obtaining the target group and the location information of each robot in the system;
[0032] Detecting position information of external obstacles in the operating environment of the swarm robot system;
[0033] Optimal selection of robots in the system according to the distributed competition and col...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More