

Hillside orchard intelligent picking robot based on visual recognition
A picking robot and visual recognition technology, applied to picking machines, color TV parts, TV system parts, etc., can solve problems such as danger and achieve the effect of reducing labor costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The following will clearly and completely describe the technical solutions in the embodiments of the application with reference to the drawings in the embodiments of the application. Apparently, the described embodiments are only some of the embodiments of the application, not all of them. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of this application.
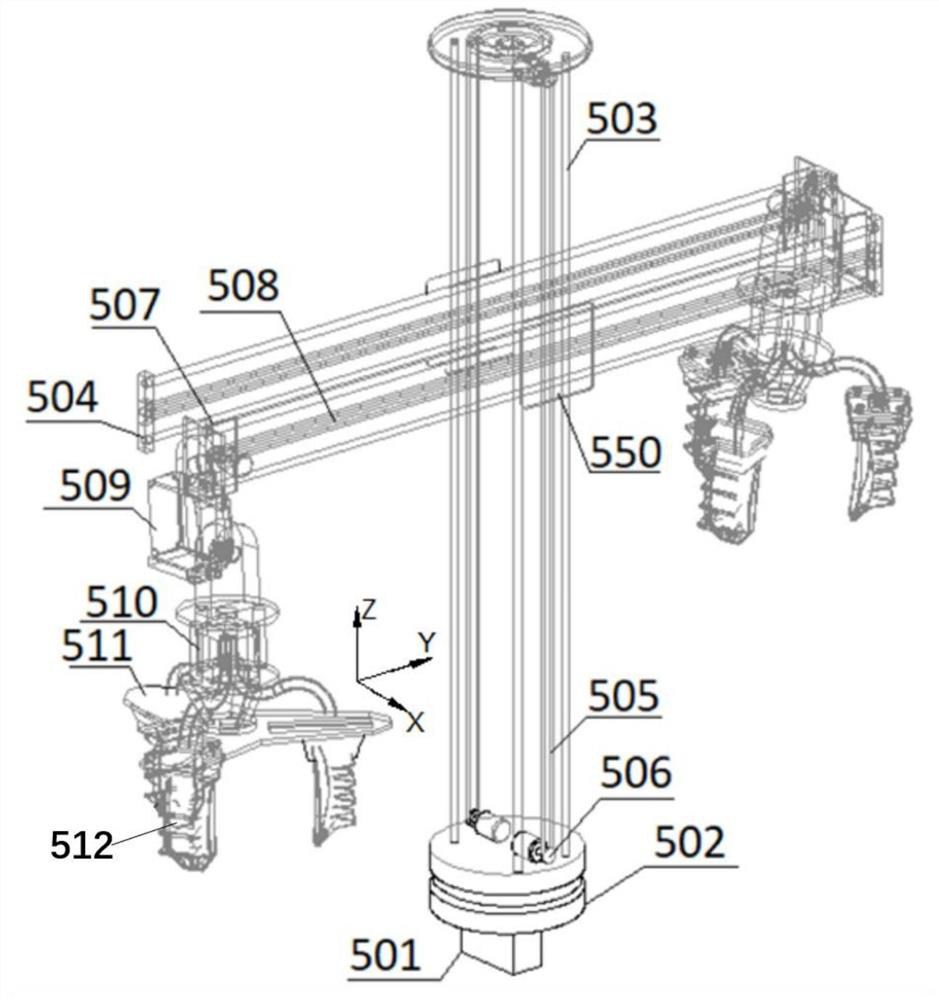
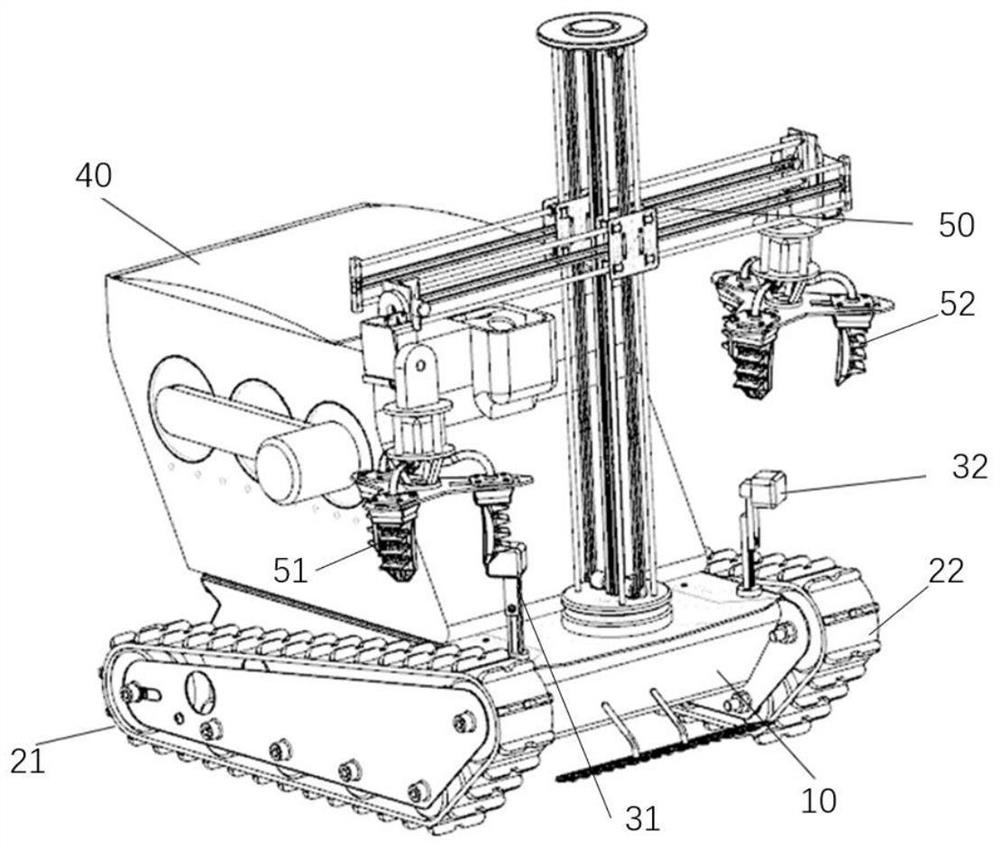
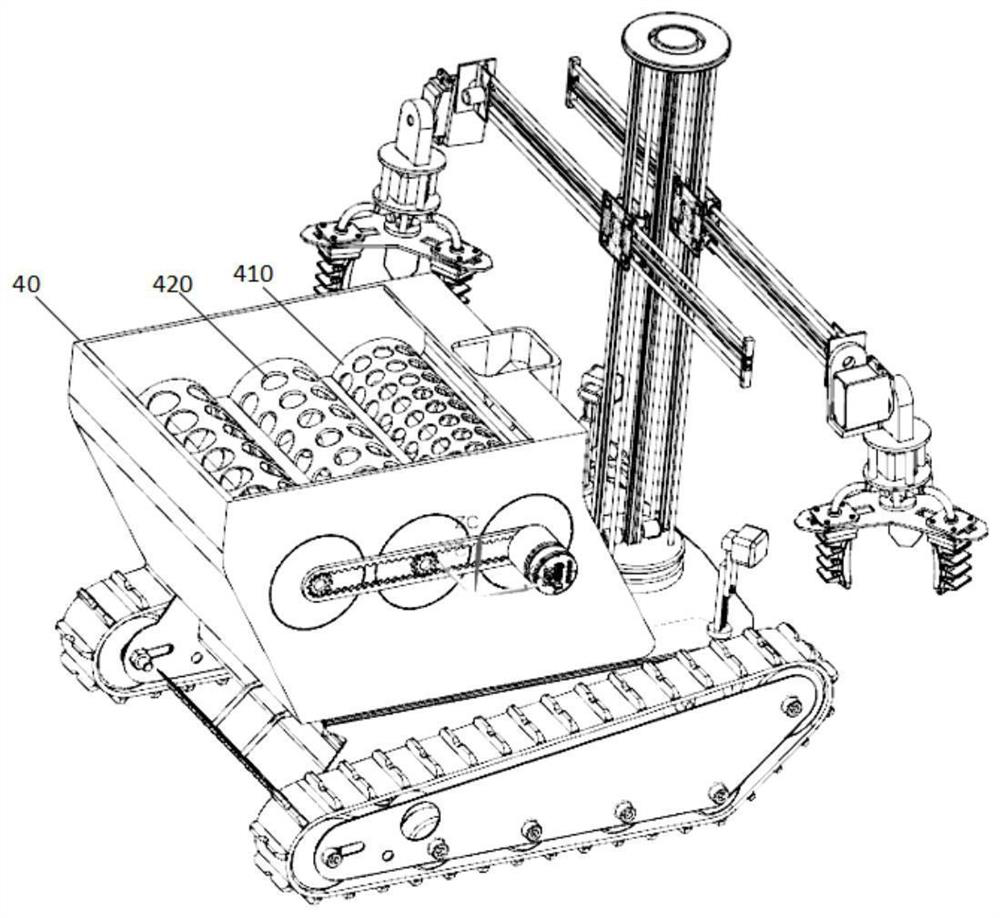
[0034] Such as figure 1 as shown, figure 1 It is a schematic structural diagram of a vision-based intelligent picking robot for mountain orchards provided by an embodiment of the present invention. The present invention provides a kind of mountain orchard intelligent picking robot based on visual recognition, and it comprises: chassis 10, the first crawler system 21, the second crawler system 22, camera system, ultrasonic sensor (not shown in the figure), storage box 40 and Grabbing syste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More