

Mobile robot with autonomous following obstacle avoidance function
A mobile robot and functional technology, applied in the field of mobile robots, can solve problems such as insufficient braking, affecting use, and affecting the service life of sensors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention more clear, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
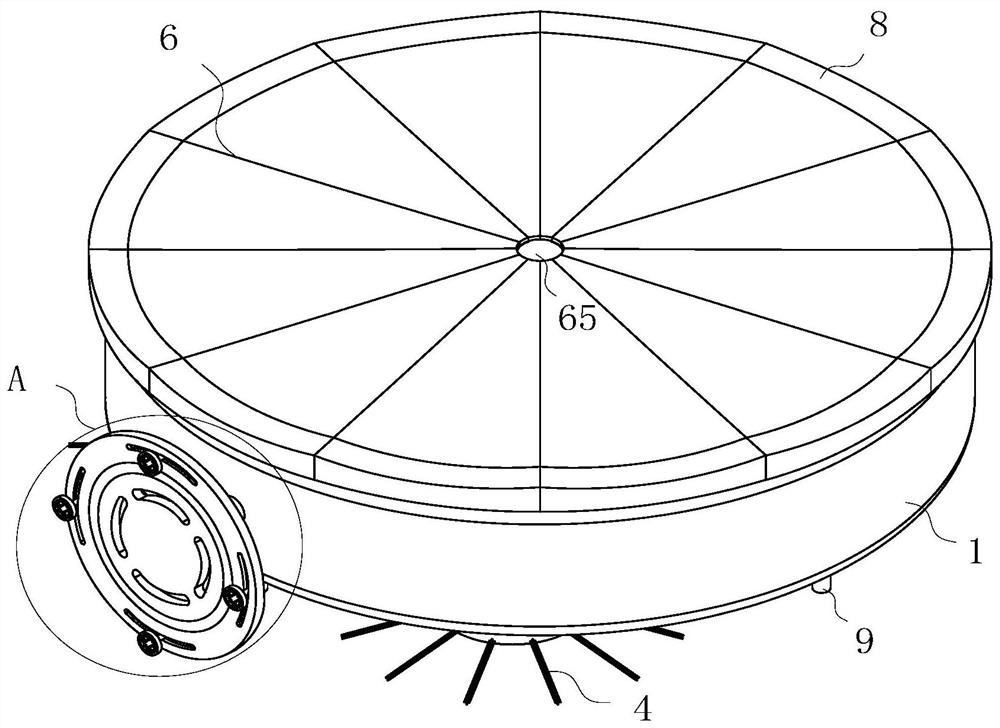
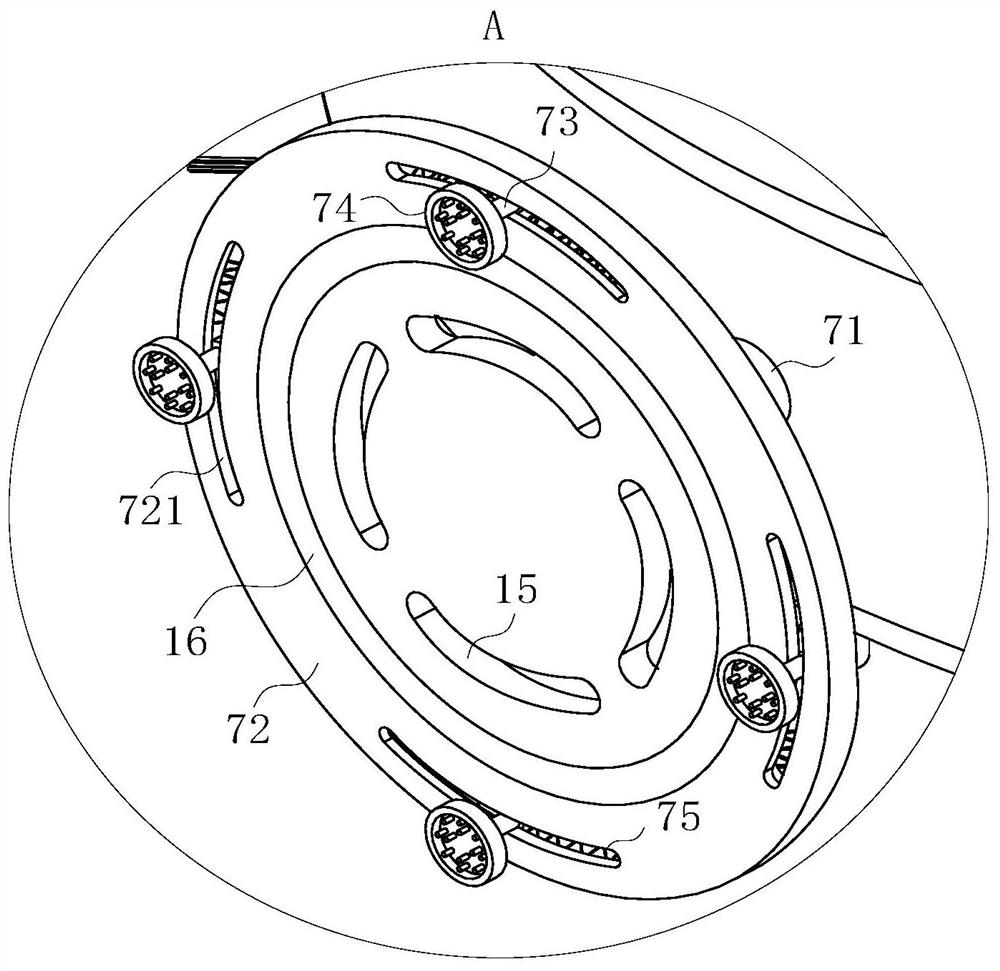
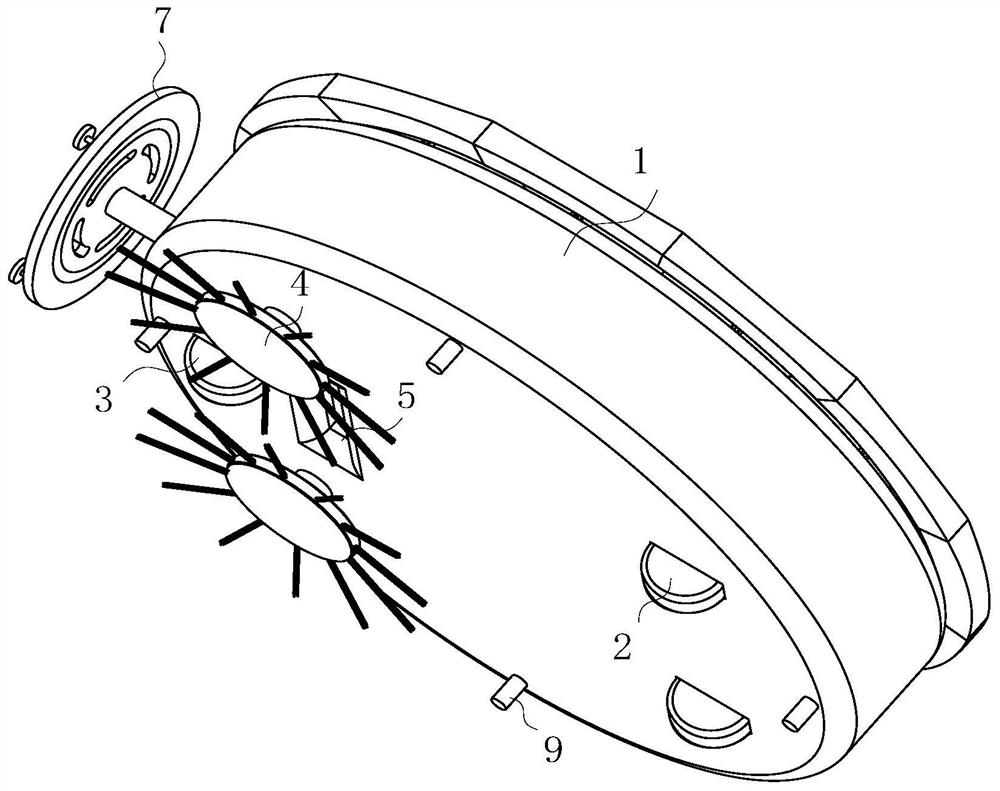
[0031] The present invention provides such Figure 1-7 A mobile robot with the function of autonomously following and avoiding obstacles is shown, including a housing 1, two driving rear wheels 2 are arranged on the bottom of the housing 1, and the bottom of the housing 1 on the front side of the two driving rear wheels 2 is p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More