

Navigation processing method, device and equipment and storage medium
A processing method and processing module technology, applied in navigation, surveying device, surveying and navigation, etc., can solve the problems of poor navigation safety and stability, and achieve the effect of improving stability and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0033] This embodiment provides a navigation processing method for navigating a vehicle. The execution subject of this embodiment is a navigation processing device, which may be set in a computer device, and the computer device may be set on a vehicle.
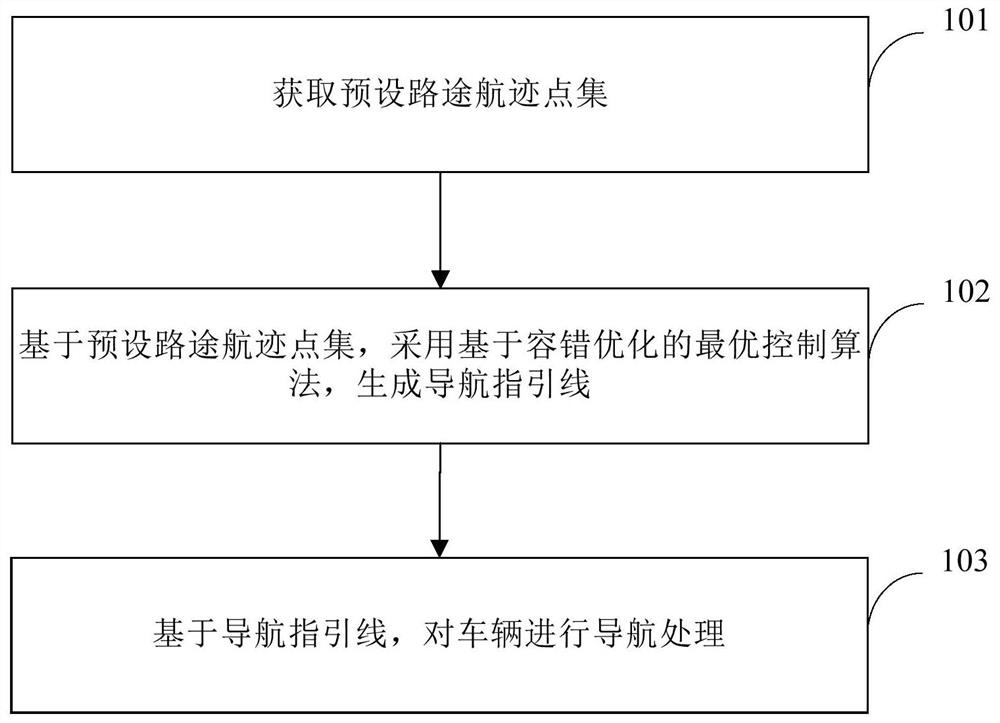
[0034] Such as figure 1 As shown, it is a schematic flow chart of the navigation processing method provided in this embodiment, and the method includes:
[0035] Step 101, acquiring a set of preset route track points.
[0036] Specifically, GIS can provide a set of preset route track points. When making a decision to plan a navigation route, it is necessary to generate a navigation guideline. The navigation guideline is a navigation reference driving route generated based on GIS data. Set up the route track point set.
[0037] Step 102, based on the set of preset route track points, an optimal control algorithm based on fault-tolerant optimization is used to generate a navigation guide line.
[0038] Among them, the optima...
Embodiment 2
[0076] This embodiment provides a further supplementary description of the method provided in the first embodiment.
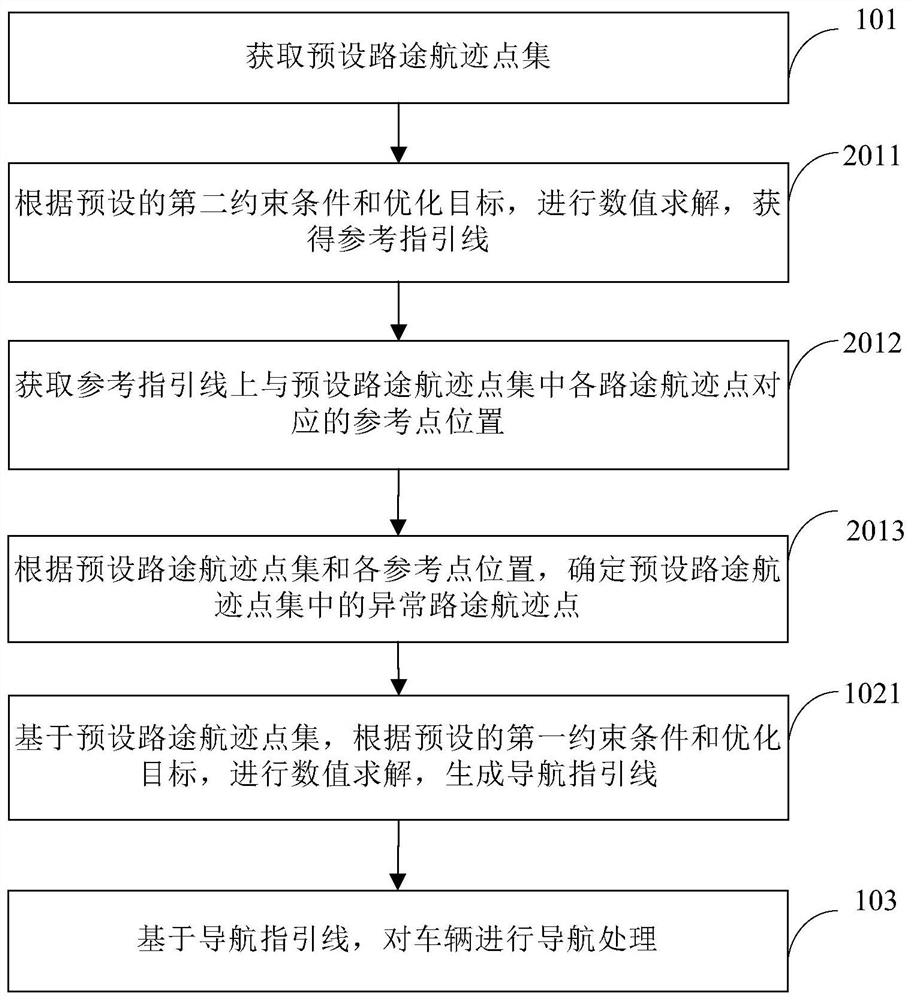
[0077] Such as figure 2 As shown in , it is a schematic flowchart of the navigation processing method provided in this embodiment.
[0078] As an implementable manner, on the basis of the first embodiment above, optionally, step 102 specifically includes:
[0079] Step 1021 , based on the preset route track point set, perform numerical solution according to the preset first constraint condition and optimization objective, and generate the navigation guide line.
[0080] Among them, the first constraint condition includes the vehicle kinematics model, the boundary value constraint conditions of the vehicle at the initial and termination moments, the variable boundary constraint conditions during the vehicle movement process, the equally spaced sampling position points in the vehicle driving path and the corresponding non-abnormal road track The maximum distan...
Embodiment 3
[0166] This embodiment provides a navigation processing device for executing the method in the first embodiment above.
[0167] Such as Figure 6 As shown in , it is a schematic structural diagram of the navigation processing device provided in this embodiment. The navigation processing device 30 includes an acquisition module 31 , a generation module 32 and a processing module 33 .
[0168] Among them, the acquisition module is used to obtain the preset route track point set; the generation module is used to generate the navigation guidance line based on the preset route track point set, using the optimal control algorithm based on fault-tolerant optimization; wherein, based on fault-tolerant optimization The optimal control algorithm performs fault-tolerant processing on the abnormal route track points in the preset route track point set; the processing module is used to perform navigation processing on the vehicle based on the navigation guide line.
[0169] Regarding the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More