

An obstacle-surpassing robot based on a wheel-legged chassis
A robot and chassis technology, applied in the field of off-road robots, can solve the problems of difficult to meet high flexibility, slow travel speed, inflexible steering, etc., and achieve the effect of superior obstacle crossing, reasonable structure and small size.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to enable those skilled in the art to better understand the technical solutions in the application, the technical solutions in the embodiments of the application are clearly and completely described below. Obviously, the described embodiments are only part of the embodiments of the application, and Not all examples. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without creative efforts shall fall within the scope of protection of this application.
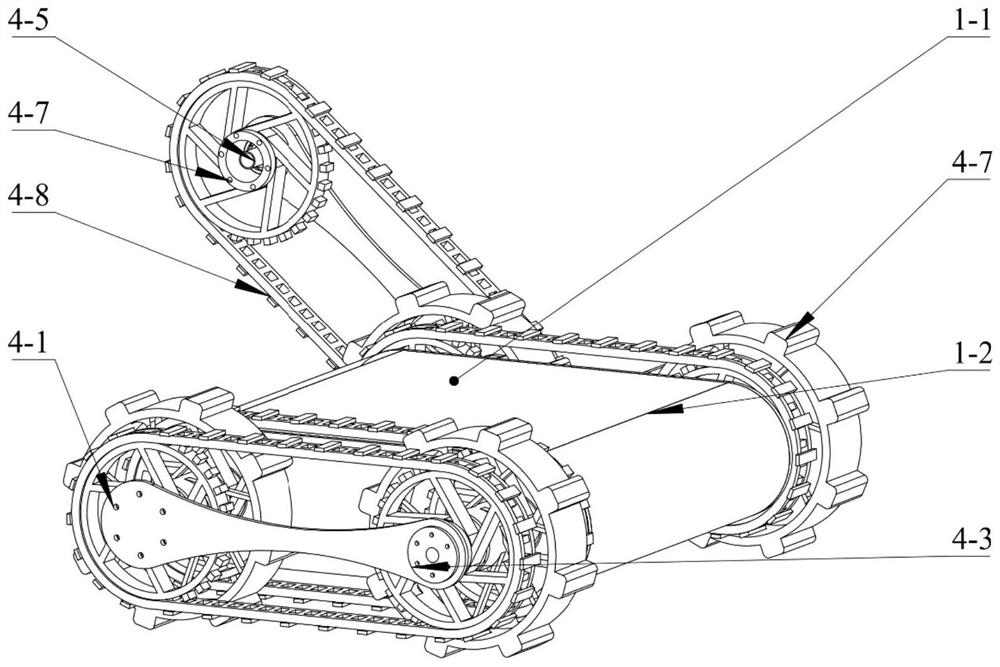
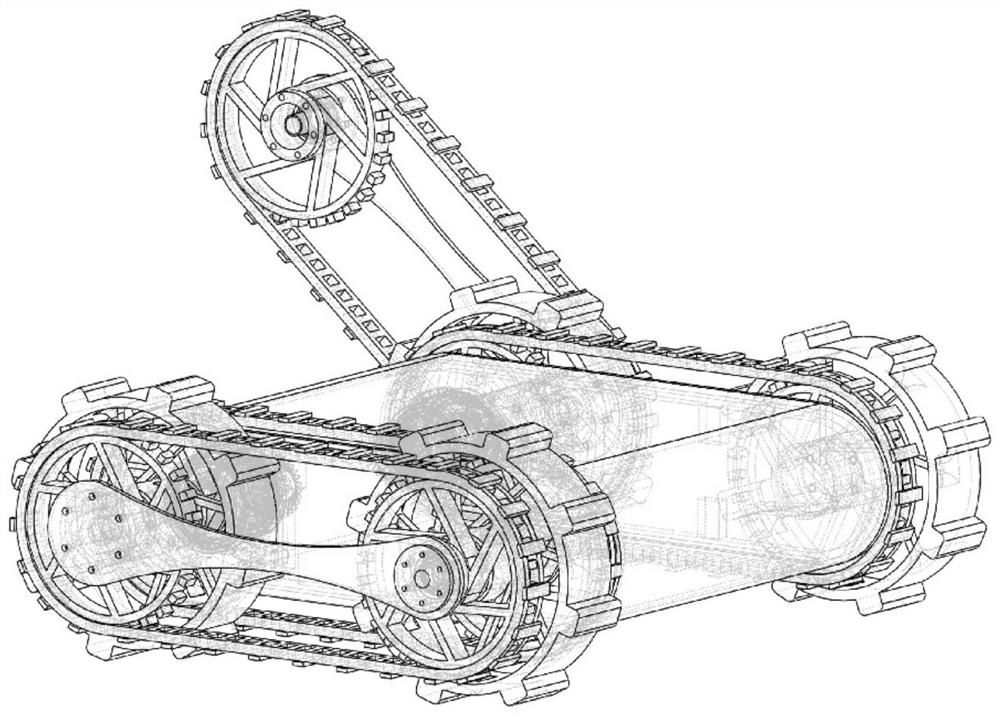
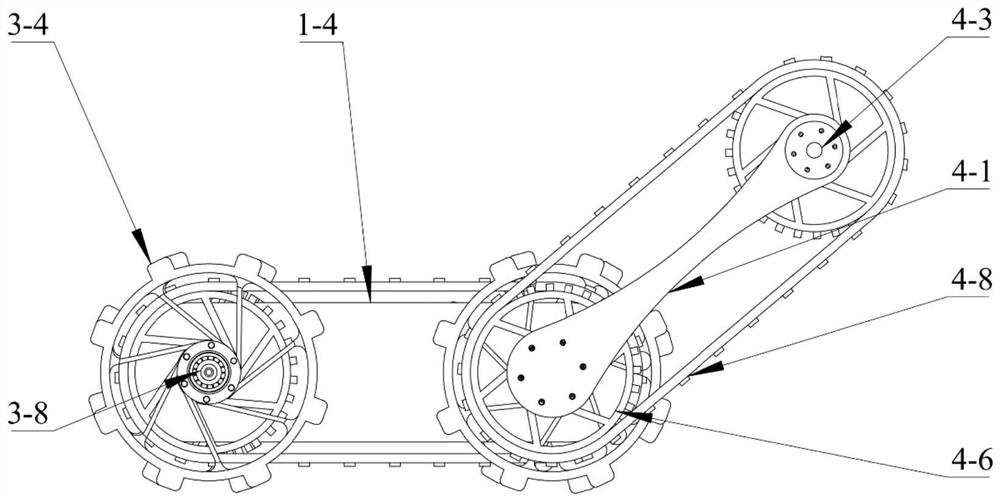
[0022] An obstacle-surmounting robot based on a wheel-track-legged chassis, including a chassis body, two sets of leg-type rocker systems, two sets of crawler systems, and two sets of wheel-type drive systems, and the two sets of wheel-type drive systems are symmetrically arranged on the chassis On both sides of the body, two sets of crawler systems are respectively arranged in cooperation with the wheel drive system, and two sets of the leg rock...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More