

Unmanned aerial vehicle target tracking method and system based on biological visual inspiration
A biological vision and target tracking technology, applied in the field of UAV target tracking methods and systems, can solve the problems of insufficient research on UAV systems, lack of UAV automatic driving systems, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
[0055] A kind of UAV target tracking method inspired by biological vision proposed by the present invention, the specific implementation steps are as follows:
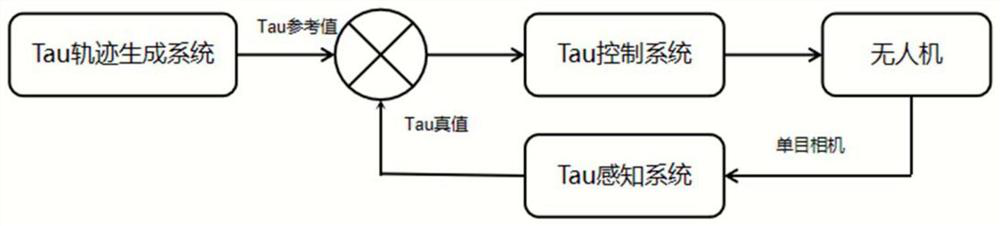
[0056] Step 1: Acquire images from the camera configured by the UAV. Assuming that there is only translational motion between the UAV and the target, according to the assumption that the light intensity between adjacent frames is constant, the gradient of light intensity in the target area, the distance between the UAV and the target are obtained. The relationship between the arrival time Tau of the target and the optical flow expansion center, the true value of Tau can be obtained by solving the least squares problem with Tau and the optical flow expansion center as variables. Specifically: Assuming that the target plane is perpendicular to the camera optical axis, any transl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More