

Point cloud semantic segmentation method for color difference guided convolution
A semantic segmentation and convolution technology, applied in the field of semantic segmentation of small-scale point cloud images, can solve the problem of not considering neighborhood information, and achieve the effect of easy overfitting, improving accuracy and reducing complexity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In point cloud image segmentation, the processing of neighborhood information is the key to feature analysis, and the present invention will be further described in detail according to the spatial distribution and color distribution of points in the neighborhood.
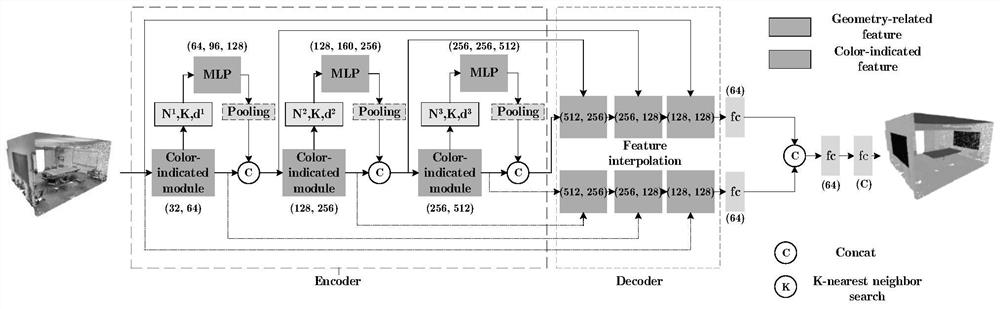
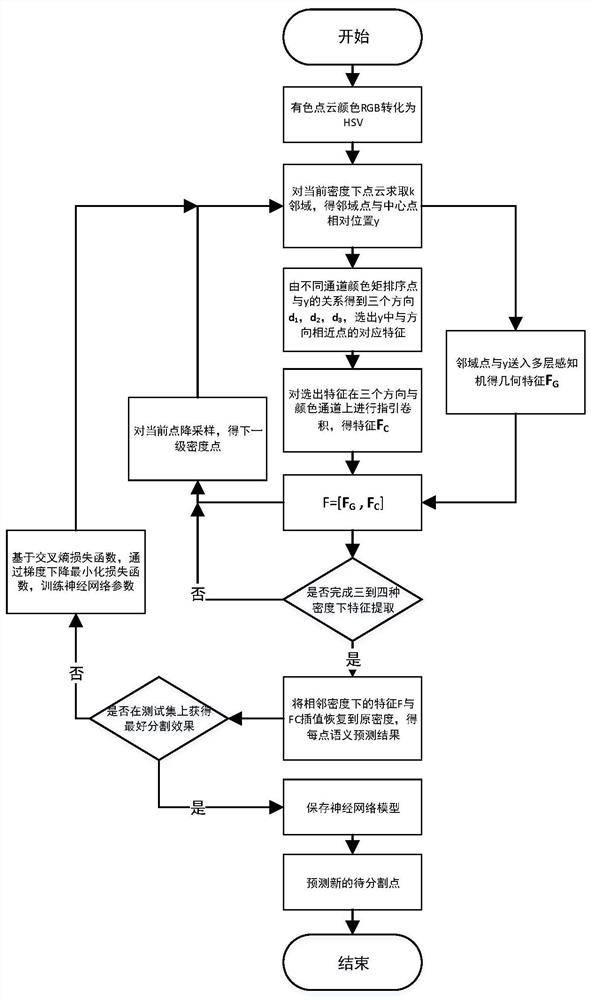
[0040] see figure 1 , figure 2 , the point cloud semantic segmentation method based on color difference guided convolution of the present invention is divided into the following nine steps, and each step is specifically as follows:
[0041] Step 1: Convert the RGB channel of the colored point cloud into an HSV color channel:
[0042] V=max(R,G,B)
[0043]
[0044]
[0045] if H<0, H=H+1
[0046] Step 2: For the point cloud under the current density, find the center point x in the k neighborhood i and the neighbor point x k with the center point x iThe relative position y is sent to the three-layer MLP to obtain the high-dimensional embedded feature F G =MLP(x i ,y);
[0047] y=x k -x i
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More