Unmanned aerial vehicle actuating mechanism fault diagnosis method based on extended Kalman filtering
A technology of extended Kalman and Kalman filter, which is applied in the field of fault diagnosis of UAV actuators based on extended Kalman filter, and can solve the problems of large number of filter observers and large amount of computation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
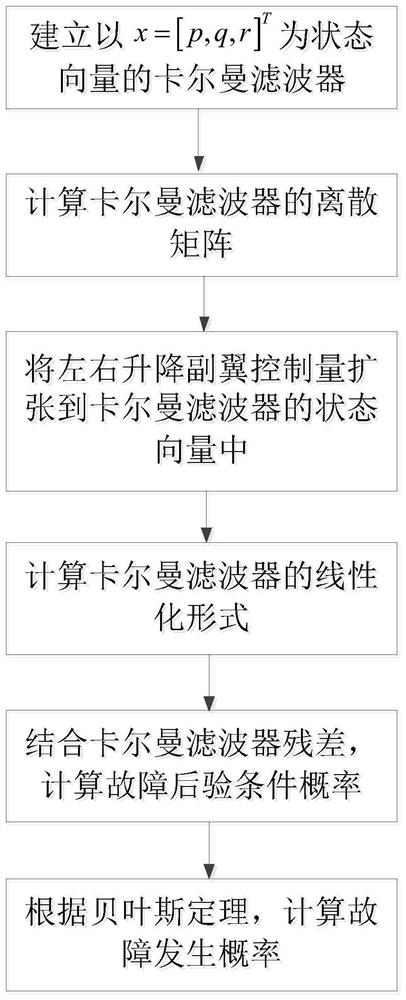
[0051] The first step: select the state most relevant to the UAV sensor measurement as the state vector of the fault diagnosis Kalman filter, and define the state vector as x=[p,q,r] T ; Among them, p represents the roll rate, q represents the pitch rate, and r represents the yaw rate.
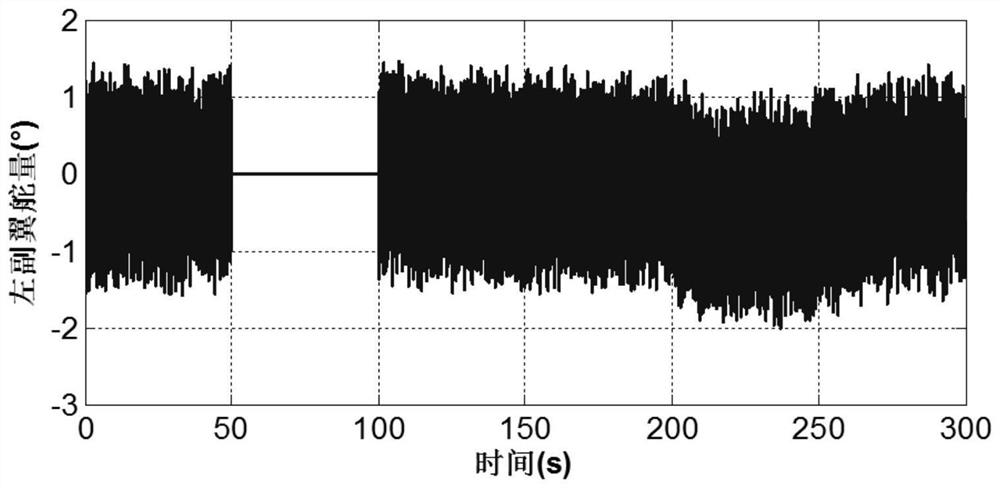
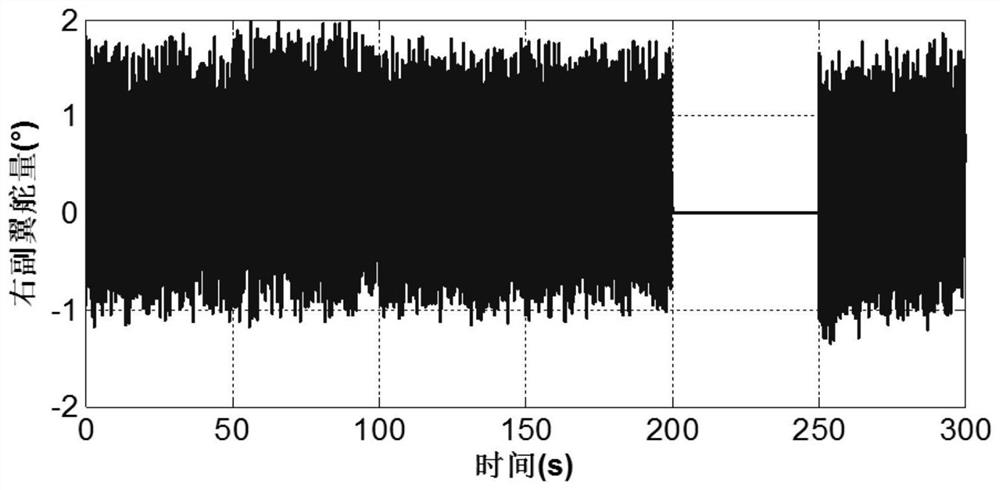
[0052] The second step: take the left elevon and right elevon of the UAV as the research object of fault diagnosis, and define the control vector as u=[δ 1 ,δ 2 ] T , where δ 1 Indicates the right elevon control amount, δ 2 Represents the left elevon control quantity, and calculates the discrete matrix of the fault diagnosis Kalman filter:
[0053]
[0054]
[0055] Among them, F represents the state transition matrix of the fault diagnosis Kalman filter, eye (3) represents the third-order identity matrix, [I xx , I yy , I zz ] represents the moment of inertia of the UAV, b represents the width of the wing, and c A represents the mean geometric chord length, Q * Indicates the dy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com