Classifier integration-based concrete mixer truck mixing tank steering detection and tracking method
A technology for concrete mixer trucks and mixing buckets, applied in the field of image processing, can solve problems such as low precision, unreliable detection and tracking, and low efficiency of real-time monitoring, and achieve the effect of improving tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0008] 1. A method for detecting and tracking the steering of a concrete mixer truck mixing bucket based on classifier integration, characterized in that the method comprises the following steps:
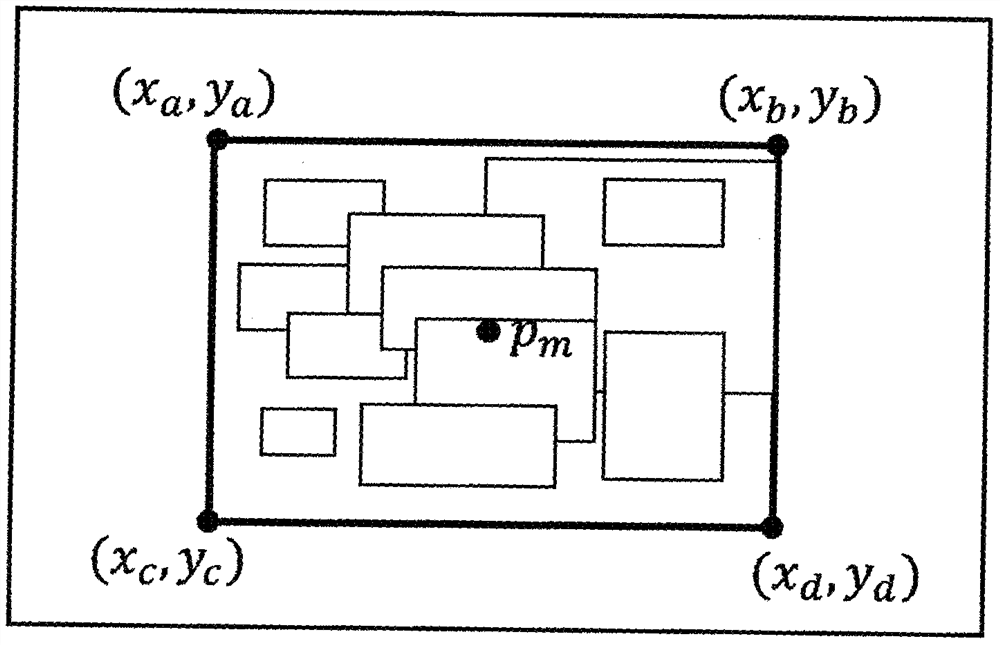
[0009] Step 1: Concrete mixer truck mixer drum operation video data set collection, collect video images of the mixer drum in operation, exclude as much as possible the area other than the mixer drum during the video collection process, filter out the data source for detection and tracking, and then select the interested region of interest, and perform image preprocessing operations;
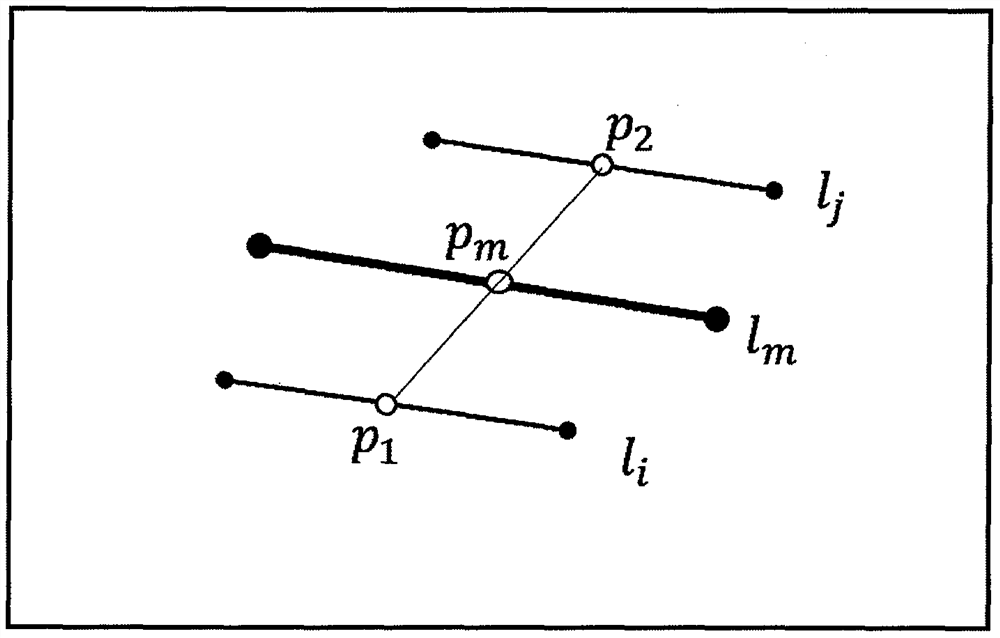
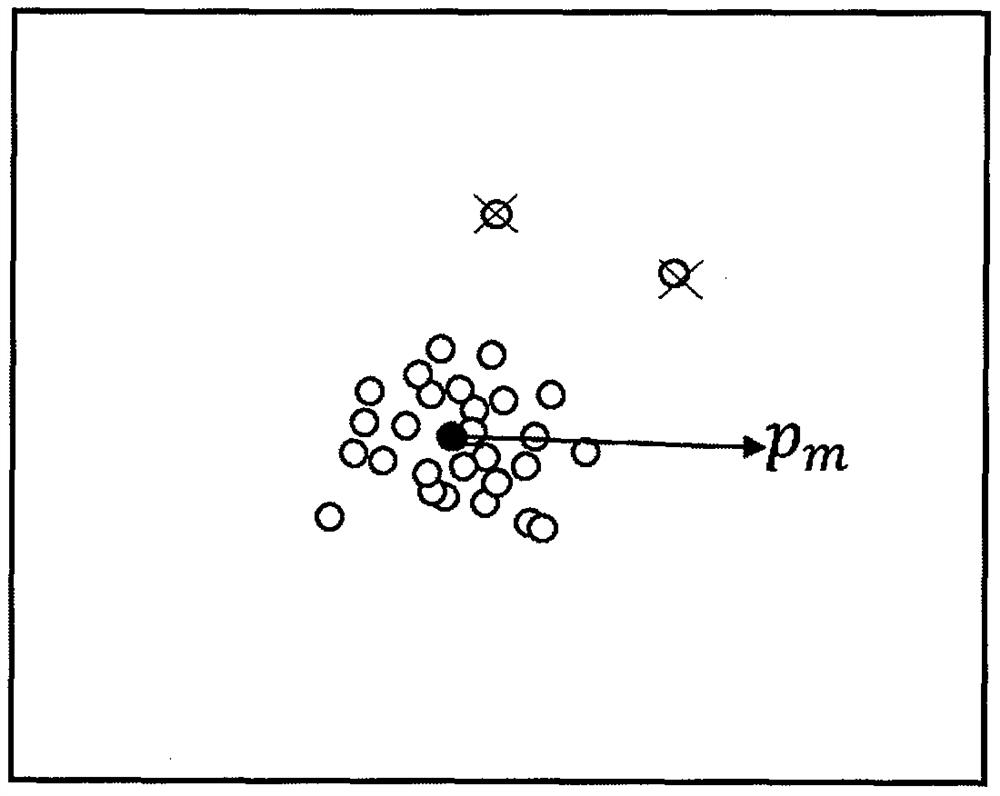
[0010] Step 2: feature detection of the mixing tank, according to the data set collected in step 1, perform line detection, corner point detection and contour detection on it, mark the detected features, and extract the center point of the corresponding feature;
[0011] Step 3: Track the feature of the mixing tank. According to the feature center point obtained in step 2, and then compare the change ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com