Robot motion posture visual estimation method
A technology for robot motion and pose estimation, which is applied in instrumentation, calculation, image data processing, etc., can solve the problem that robot estimation is susceptible to interference, achieve the effect of eliminating cumulative errors and reducing hardware costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0050] In order to illustrate the technical solution of the present invention more clearly, the technical solution of the present invention is described in further detail below in conjunction with the accompanying drawings:
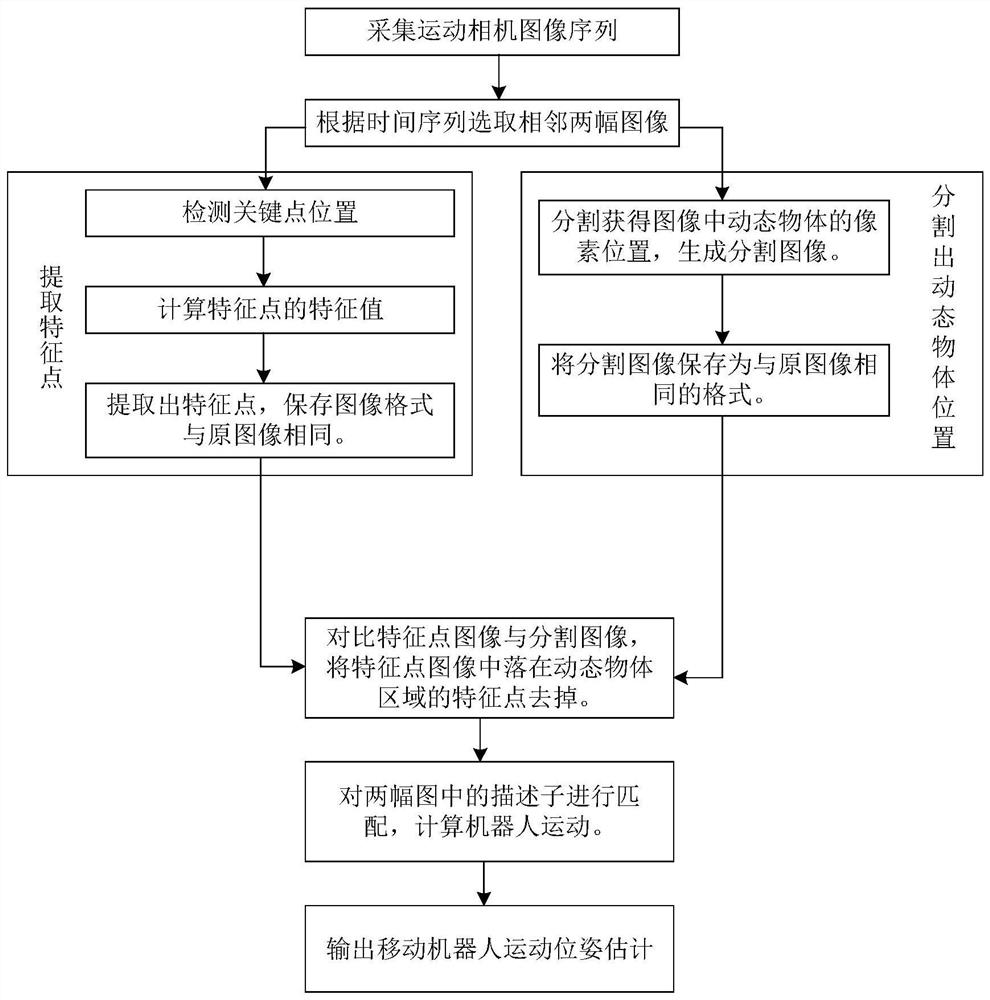
[0051] Such as figure 1 Described; A kind of robot movement posture visual estimation method, comprises the following steps:
[0052] Step (1.1), collecting continuous video images in a dynamic environment, selecting two of the collected images, detecting key points, calculating key point feature values, detecting and saving feature point positions;
[0053] Step (1.2), segmenting the original image, obtaining and saving the position of the pixel area where the dynamic object is located in the image;
[0054] Step (1.3), comparing the image for storing the feature point information with the image for saving the segmentation result, removing the feature points distributed in the pixel area where the dynamic object is located in the image for storing the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More