

Robot demonstration teaching method based on meta-imitation learning
A teaching method and robot technology, applied in the field of robot demonstration and teaching based on meta-imitation learning, can solve problems such as inefficiency, difficulty in designing reward functions, and time-consuming
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
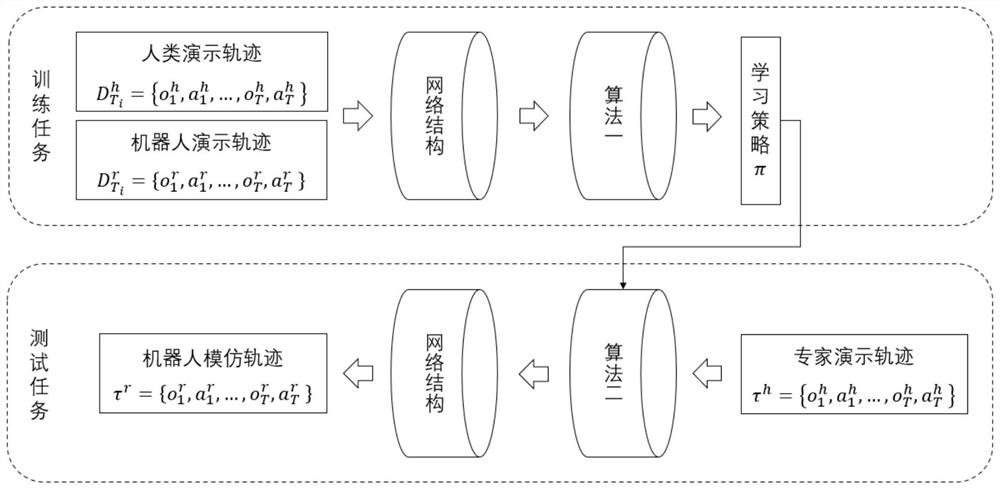
[0040] figure 1 Provided the overall flow diagram of the present invention, as figure 1 As shown, the present invention provides a robot demonstration and teaching method based on meta-imitation learning, comprising the following steps:
[0041] Step S1: Obtain the robot demonstration teaching task set p(T);
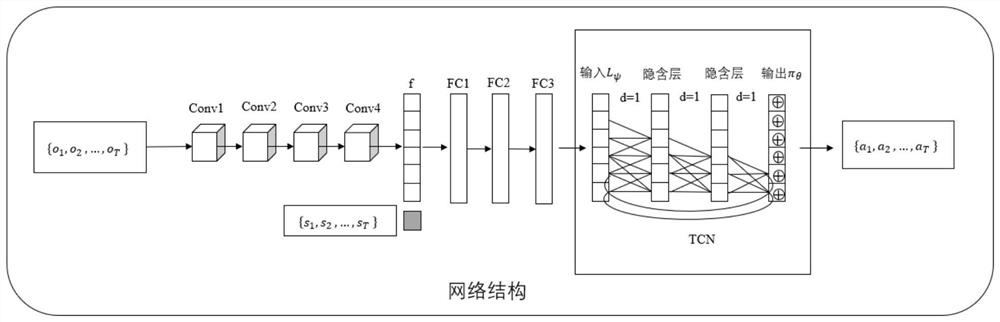
[0042] Step S2: Construct the network structure model and obtain the adaptive target loss function L ψ ;
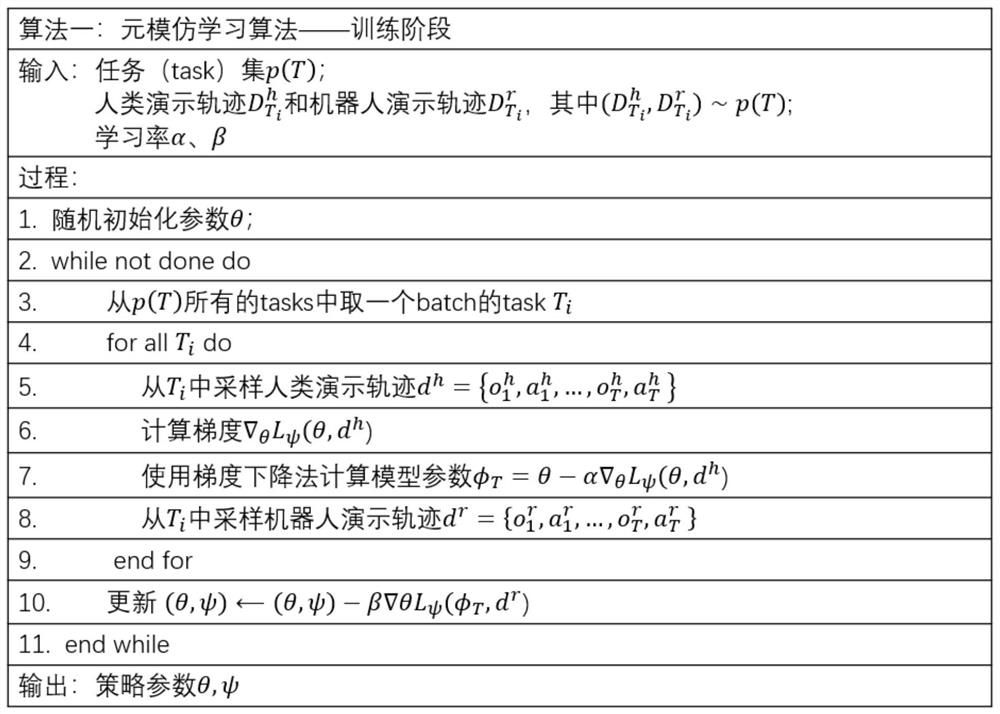
[0043] Step S3: In the meta-training stage, use Algorithm 1 to learn and optimize the adaptive target loss function L ψ , to obtain the policy parameters θ and ψ;
[0044] Step S4: In the meta-testing stage, use Algorithm 2 for the trajectory τ demonstrated by the experts h To learn and get the learning strategy π φ ;
[0045] Step S5: The expert demonstrates the trajectory As input, combined with the learned policy π φ , using the network structure model to generate robot imitation trajectories combined with robot state information (s 1 ,s 2 ,...,s T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More