Feeding and discharging dual-grabbing manipulator
A technology for grabbing manipulators and material clips, which is applied in the direction of conveyor objects, transportation and packaging, etc. It can solve the problems that one person cannot operate multiple machines, and achieves the effect of wide application range, simple structure and accelerated automation process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The specific implementation manners of the present invention will be described in detail below in conjunction with the accompanying drawings. The described embodiments are only illustrations and explanations of the present invention, and do not constitute the only limitation of the present invention.
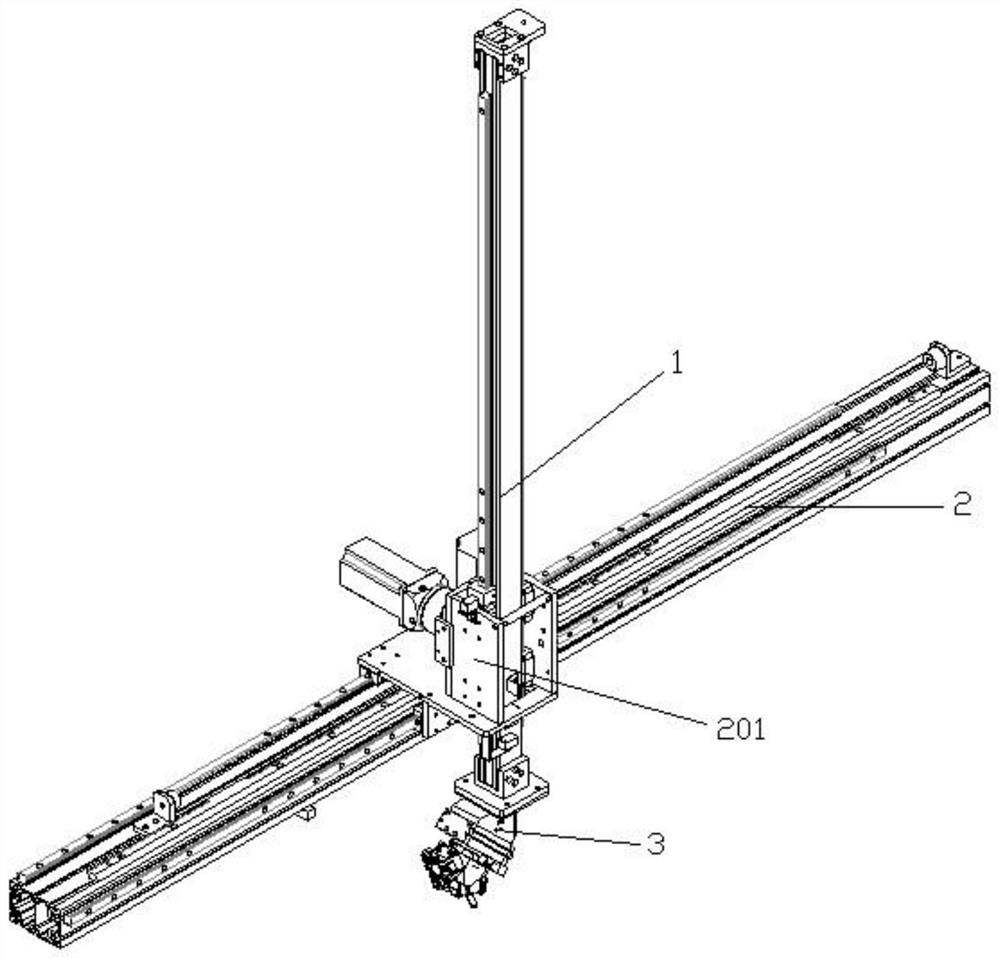
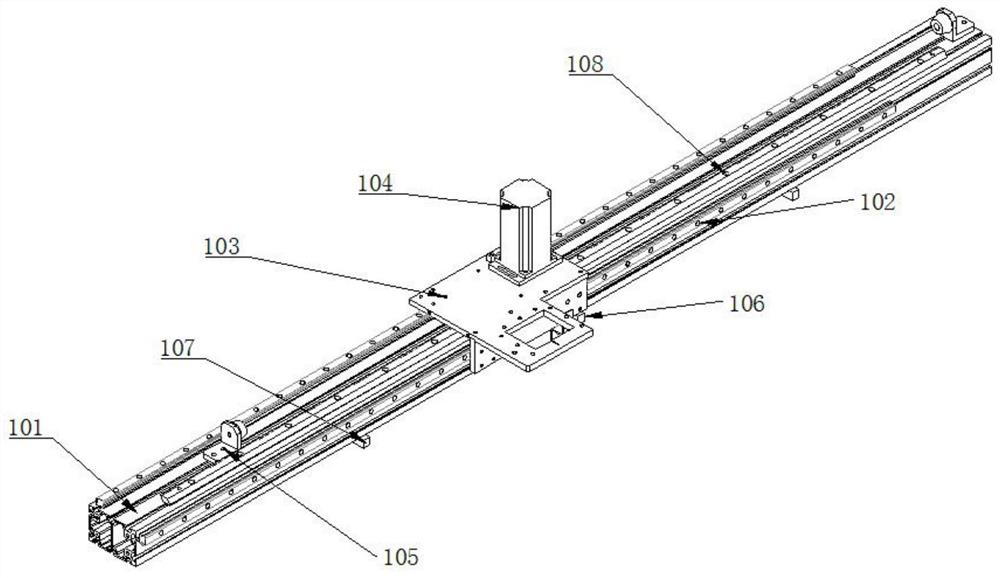
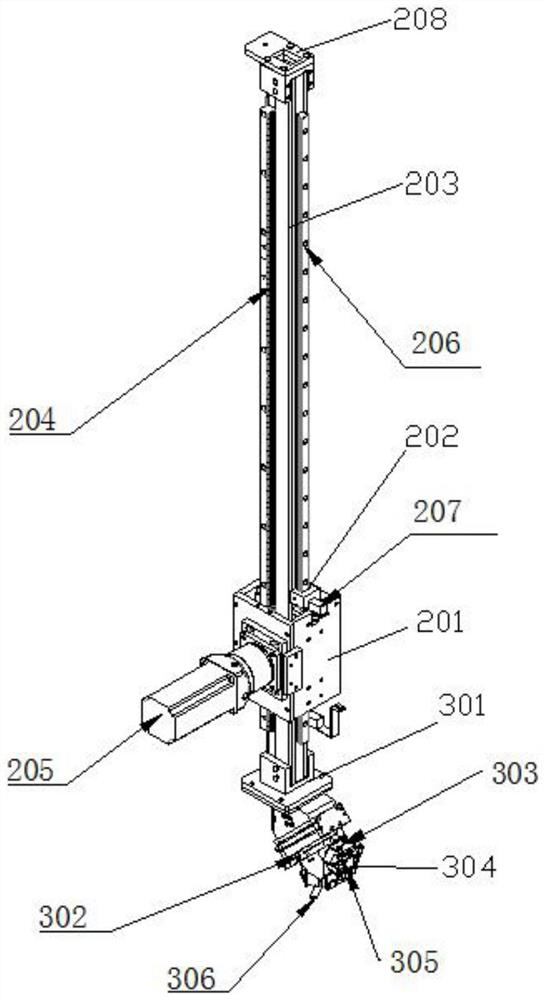
[0016] Such as Figure 1-Figure 5 As shown, this embodiment includes a translation assembly 1, a lifting assembly 2, and a double-claw reversing clamping tooth mechanism 3. The translation assembly includes an aluminum profile base 101, and the aluminum profile base 101 is provided with a pair of linear guide rails arranged in parallel. 102, a straight rack 108 is correspondingly arranged between the two linear guide rails 102, a translation slide 103 is installed on the linear guide rail 102, a servo motor 104 is installed on the translation slide 103, and the servo motor 104 The output end of the aluminum profile base 101 is provided with a drive gear corresponding to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More