Industrial robot tray grabbing height intelligent detection method
An industrial robot and intelligent detection technology, applied in manipulators, manufacturing tools, etc., can solve problems such as increased production costs, system errors, and production stagnation, and achieve the effects of controlling production costs, high robustness, and easy replication
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be described more clearly and completely below in conjunction with the accompanying drawings in the embodiments. Of course, the described embodiments are only a part of the present invention. Not all, based on this embodiment, other embodiments obtained by those skilled in the art without creative efforts are all within the protection scope of the present invention.
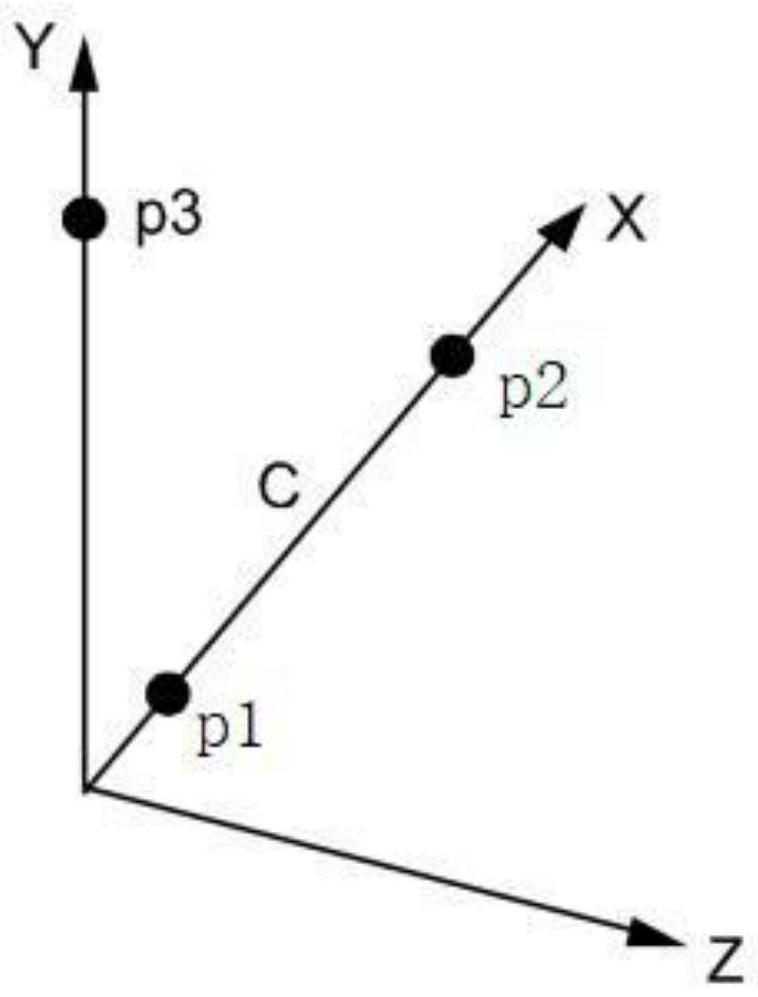
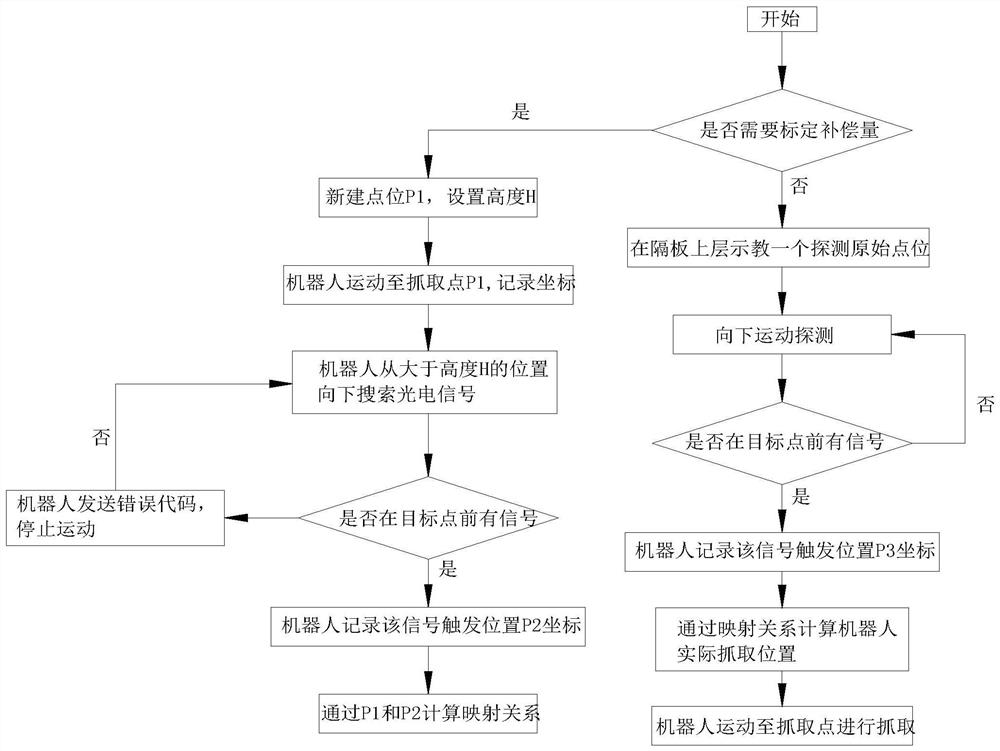
[0019] Such as Figure 1 to Figure 2 Shown, a kind of industrial robot pallet grab height intelligent detection method, this method utilizes the photoelectric distance sensor that is installed on the robot gripper to detect, and described detection method comprises the following steps:
[0020] Step 1: Place a partition on the ground, move the robot to the grab point of the partition, and record the teaching grab point P 1 (x 1 ,y 1 ,z 1 ,a 1 ,b 1 ,c 1 );
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More