Unmanned aerial vehicle cluster control method of jackdaw-imitating pairing interaction mechanism
A swarm control and unmanned aerial vehicle technology, applied in non-electric variable control, control/regulation systems, three-dimensional position/channel control, etc., can solve the problems of low communication load, communication congestion, and large communication load.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
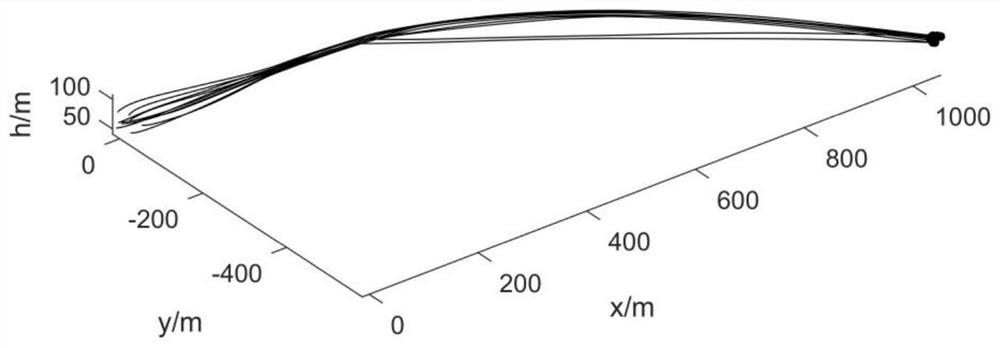
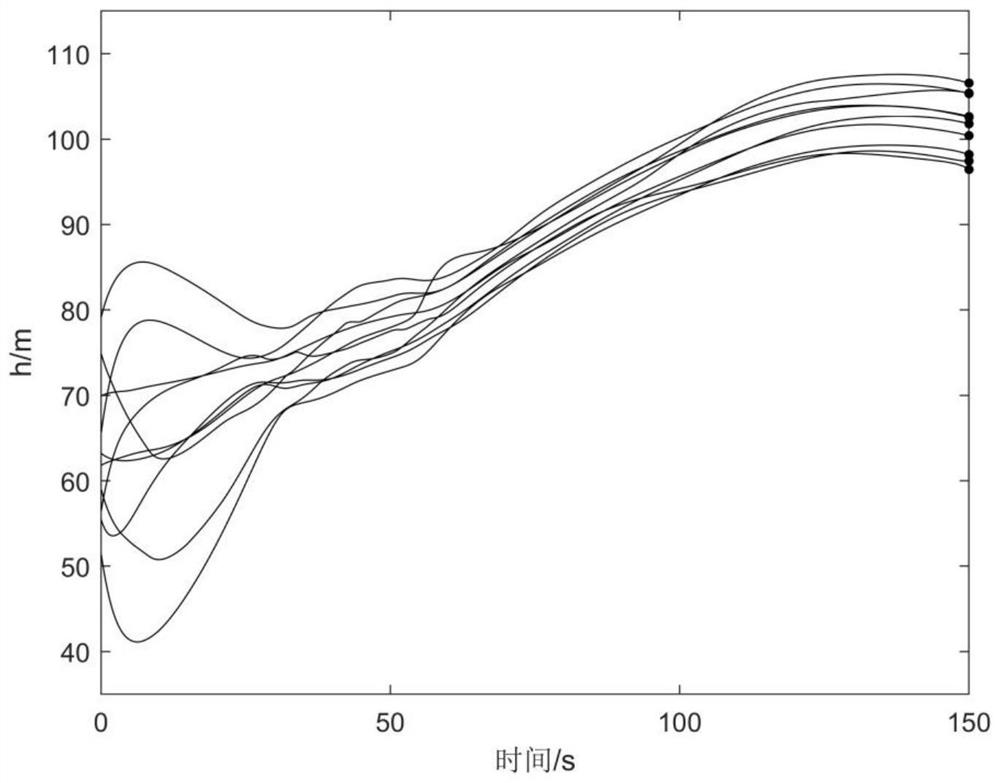
[0080] The effectiveness of the proposed method of the present invention is verified below through a specific example. In this example, the experimental computer is configured with intel i5-4210 processor, 1.70Ghz main frequency, 4G memory, and the software is MATLAB2018b version.
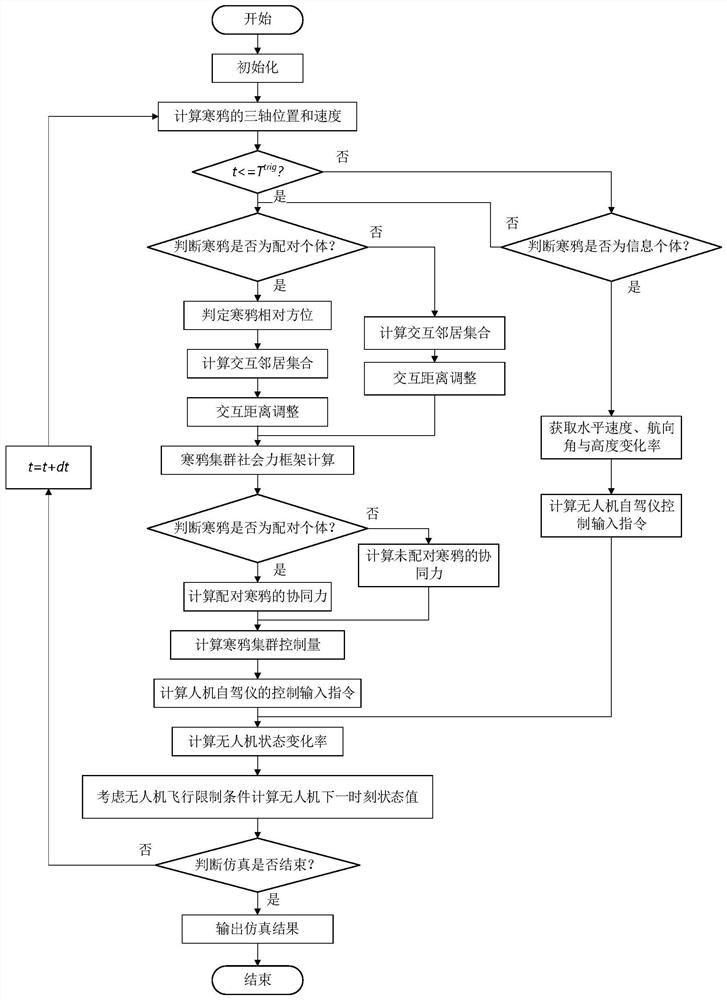
[0081] The UAV swarm control method imitating the jackdaw pairing interaction mechanism, its realization process is as follows figure 1 As shown, the specific steps of this example are as follows:
[0082] Step 1: Initialize
[0083] Generate the initial flight status of 10 UAVs. The three-dimensional space positions are: (-1.2419m, -16.5094m, 74.9615m), (18.7793m, -12.6490m, 58.9982m), (-12.1978m, 8.2152m, 55.4164m), (-1.4887m, 17.0093m, 56.4767m), (7.2017m, 0.5981m, 65.6621m), (-5.6412m, 5.0097m, 61.8010m), (0.3644m, -10.1288m, 51.3619m) , (-7.3472m, 11.3368m, 79.1270m), (9.1079m, 6.0395m, 69.9385m), (-4.0424m, 6.8183m, 63.2160m), the horizontal speed, heading angle and altitude change rate ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More