Spatial non-cooperative target attitude evaluation method with image scale transformation
A non-cooperative target and scale transformation technology, which is applied in image enhancement, image analysis, image data processing, etc., can solve problems such as poor illumination and distance adaptability, algorithm adaptability, and image features are difficult to robustly extract, etc., to achieve strong practicability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in detail below in conjunction with the accompanying drawings.
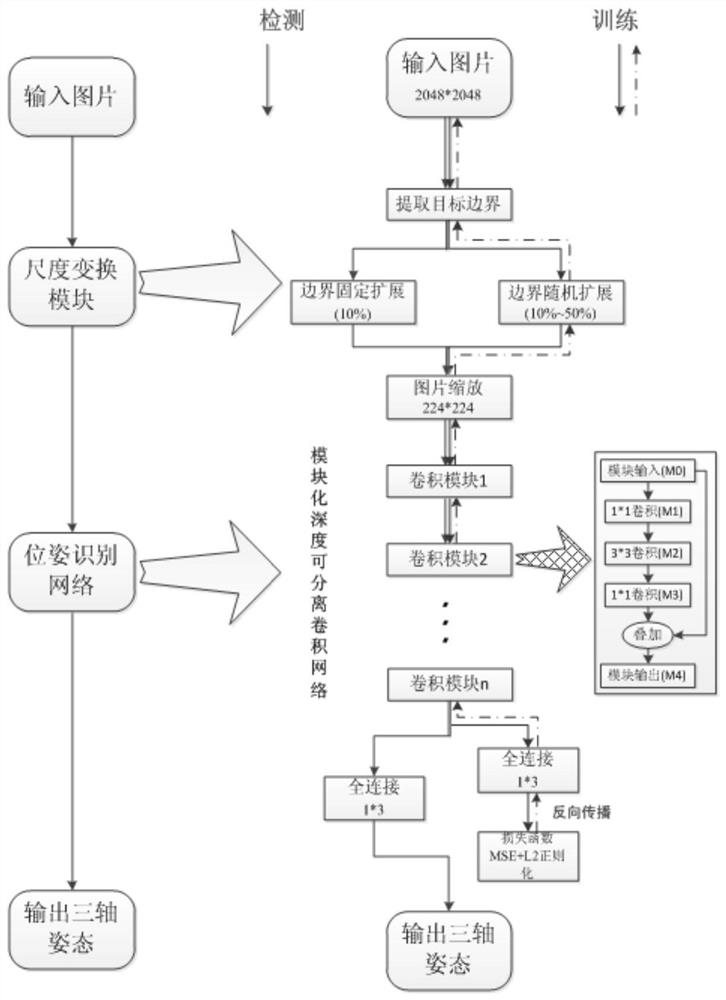
[0036] Aiming at the problems faced by traditional solutions, using the convolutional neural network algorithm that has achieved great success in the image field, by designing a deep convolutional network module structure, the deep-level features of the image can be automatically extracted to achieve end-to-end design. In order to deploy the convolutional neural network on the mobile terminal, the network parameters are required to be small and the operation speed is fast. The depth separable convolution module is proposed, and the traditional convolution operation is replaced by point convolution and depth convolution, without changing the accuracy of the algorithm. Under the condition of the rate, the model parameters are reduced to 1 / 9 of the original.
[0037] The invention introduces the convolutional neural network into the field of gesture recognition of spati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More